01-分布式训练(0)-背景知识(通信原语/NCCL/单卡计算流)
[Quick Ref for 手写code]:通信原语 + DDP demo | ipynb | Colab
前言
LLM Infra的训练部分,分布式训练是重要知识点,仅读过相关系列的论文是远远不够的,还需要明白其中的细节和第一性原理。面试常问的问题包括但不限于:描述某种并行、并行策略设计、开销分析、手写并行代码。
那么这个系列的通信细节,就以hugging face开源的 终极训练指南 为reference大纲,一一展开好了(但它讲的相对简略,所以我会随机搜索相关资料以保持基础知识和逻辑的连贯),相关link如下:
- The Ultra-Scale Playbook: Training LLMs on GPU Clusters(英文版)
- Hugging Face - The Ultra-Scale Playbook: Training LLMs on GPU Clusters
- 终极训练指南: 在大规模 GPU 集群上训练大语言模型(中文版)
此外,对经典论文的讲解也必不可少。因此,在上述训练指南的基础上,我将同步穿插分析相关代表性论文。后续的内容规划如下(每完成一个章节我会附上对应链接):
- 数据并行( Data Parallism): DP / DDP / FSDP
- 模型并行(Model Parallism)
- 张量并行(Tensor Parallisim): Megatron
- 流水线并行( Pipeline Parallelism): GPipe, PipeStream
- 上下文并行(Context Parallelism): DeepSpeed Ulysses, Ring-Attention
- 专家并行(Expert parallelism)
- Zero:数据并行的零冗余优化策略
本节主要从通信原语,对应软硬件支持,以及单卡时模型本身的计算流(辅助后续分析多卡通信内容)展开,为后续的并行切分/通信开销计算作个铺垫。如有不专业之处,欢迎指正
1. 通信原语
集体通信原语(collective communication primitives)源于HPC社区开发的 MPI (Message Passing Interface)中的一部分,在分布式训练中扮演着关键角色。
在 MPI 中,除了点对点通信(如 send/receive),还定义了更高层次的集体通信,即多个进程协同参与的操作,如 广播(broadcast)、聚合(gather)、同步(sync) 等。集体通信具有同步性,即所有进程必须同时参与。
1.1 基本原语
几种基础的集体通信操作如下:
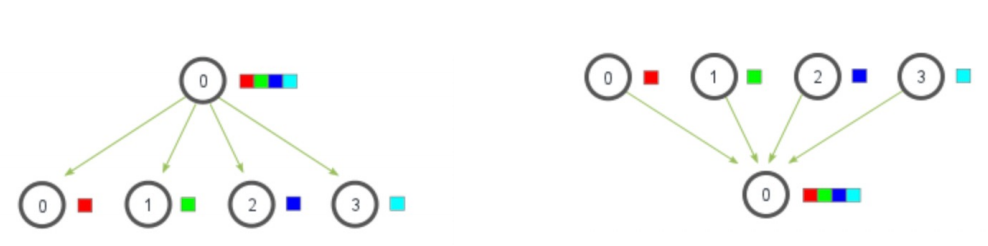
- Broadcast:进程0将数据广播复制到其他所有进程
- Scatter:进程0将自己的数据拆分后分别发给其他进程
- Gather:所有进程的数据被收集到进程0
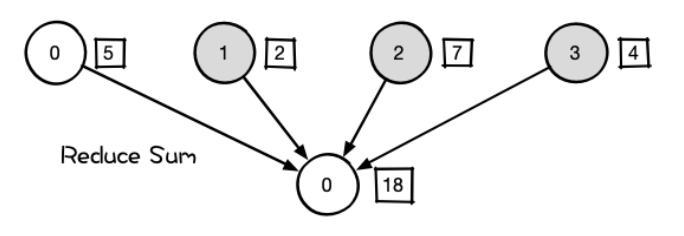
- Reduce:所有进程将数据传给进程0,执行某种reduce op
(图:scatter -> Gather - > Reduce)
1.2 Reduce Scatter / All Gather
相比基础原语,Reduce Scatter 和 All Gather 更常用于优化大规模训练中的通信瓶颈。
【Reduce Scatter】
本质是一个跨节点的分片reduce操作。
假设有 4 个节点,每个节点持有一段相同维度的向量:
-
节点 输入 N0 [1, 2, 3, 4] N1 [10, 20, 30, 40] N2 [100, 200, 300, 400] N3 [1000, 2000, 3000, 4000]
Step 1: Reduce
对相同位置元素做加法(加法是最常见的 Reduce 操作):
-
Step 2: Scatter
-
N0 拿到 [1111]
- N1 拿到 [2222]
- N2 拿到 [3333]
-
N3 拿到 [4444]
-
常用通信方法:Ring Reduce Scatter
-
通信量:
-
每个node数据量:G
- 每个node发出:G * (n-1)/n
- 总通信量:(n-1)G
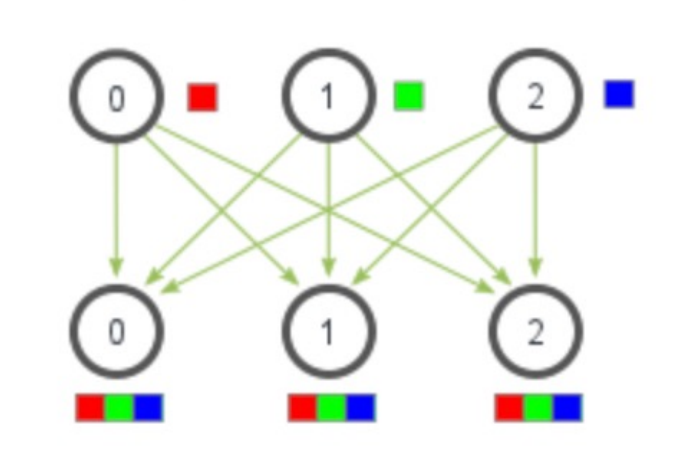
【All Gather】
每个进程都向所有其他进程广播自己的数据,最终每个进程都有全部数据。
通信量分析同样为:
- 每个node数据量:G
- 每个node发出:G * (n-1)/n
- 总通信量:(n-1)G
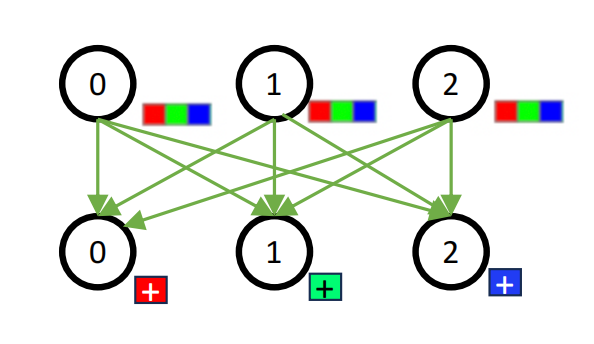
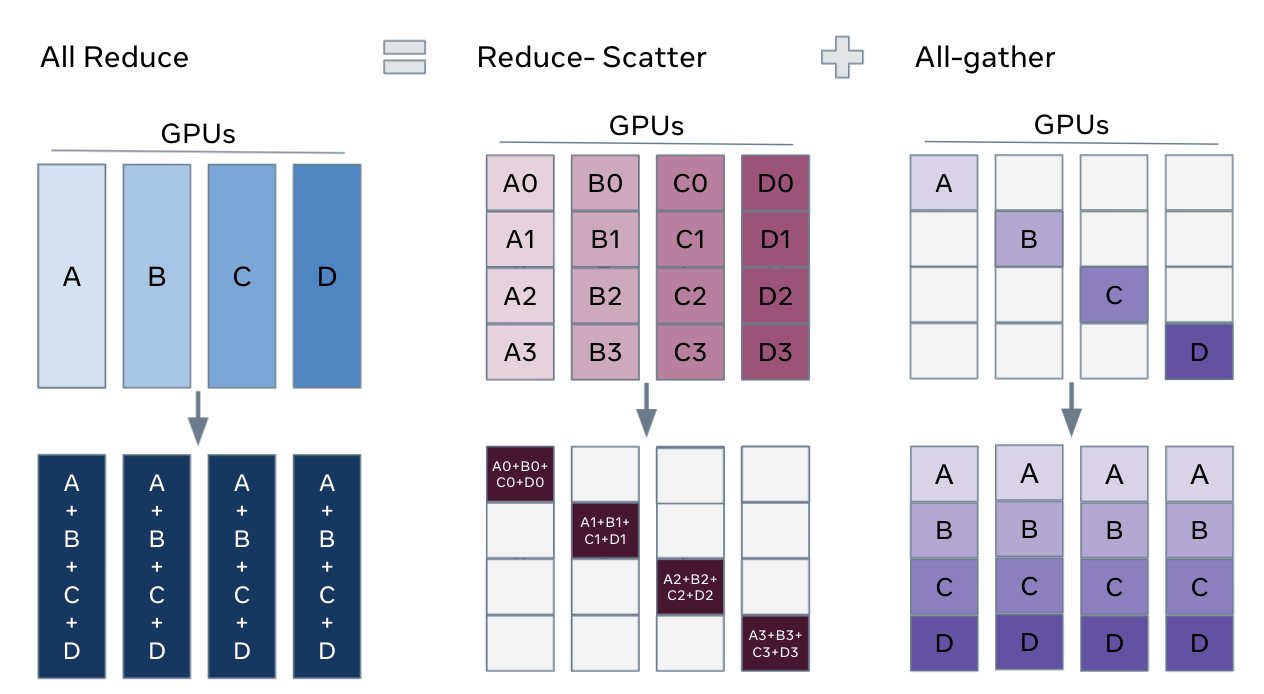
1.3 All Reduce
【通信开销】
- All Reduce = Reduce Scatter + All Gather
- 通信开销 = Cost(Reduce Scatter)+ Cost(All Gather)= 2(n-1)G
- 假设每个node数据量:G
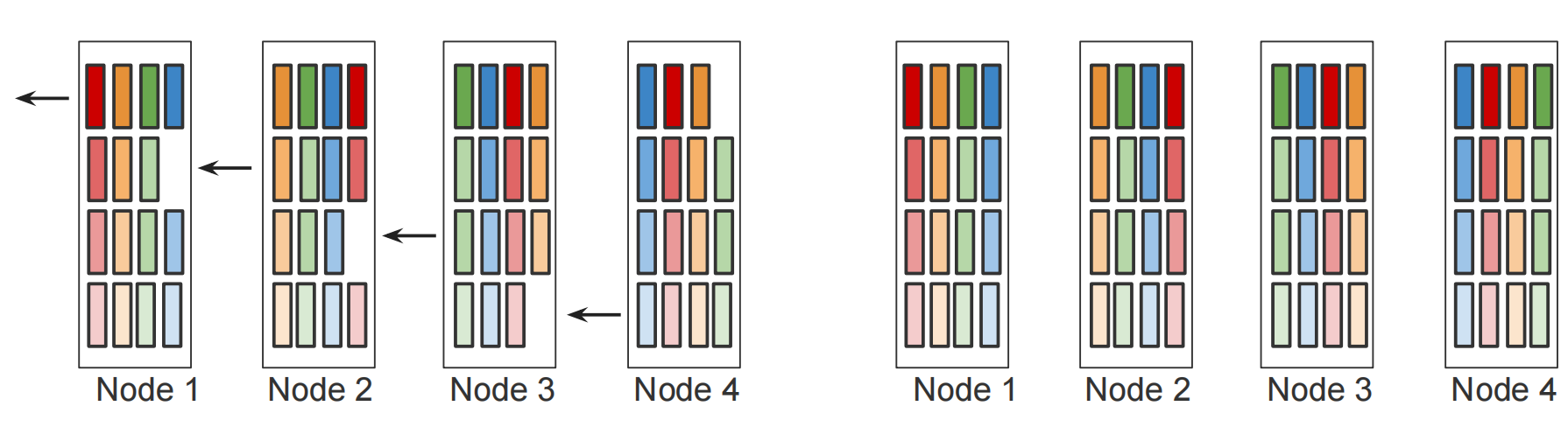
【通信方式 - Ring All Reduce】
All Reduce 的实现方式不止一种。例如:
- 集中式 All Reduce:先 gather 到一个节点计算,再广播(PyTorch DDP 的早期实现)
- 缺点:通信带宽瓶颈,其他节点资源利用率不高
- Ring All Reduce:各节点只与相邻节点通信,所有节点并行工作,充分利用带宽资源(PyTorch DDP 默认)
- Tree All Reduce:以树形结构分层聚合与广播,通信延迟更低,适用于节点数量较多的场景
最有名的 Ring All Reduce 通信结构如下图所示:
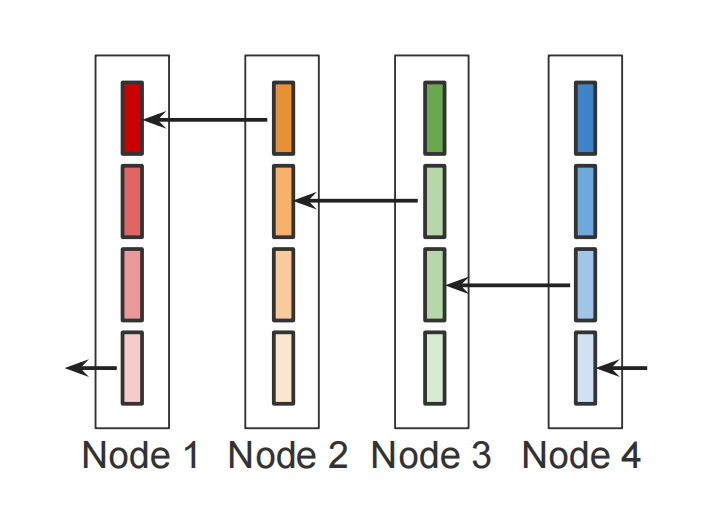
一轮(n次)Reduce Scatter结束:
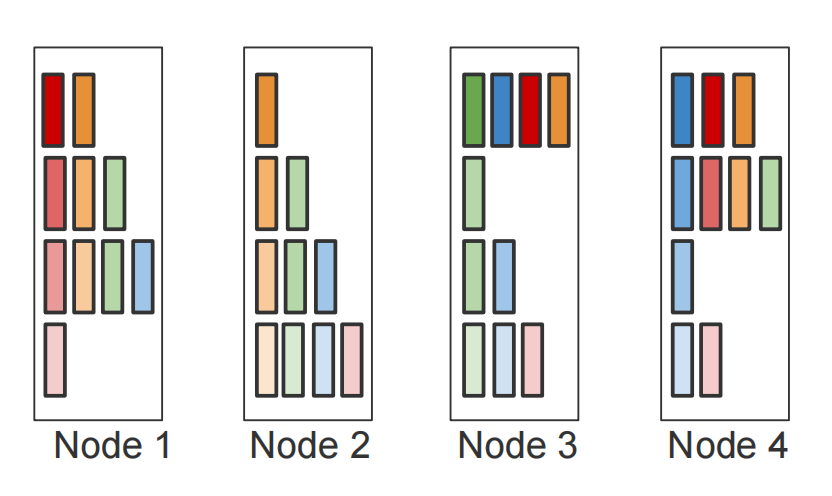
一轮(n次)All Gather & All Reduce结束:
2. 通信方式(软硬件)
为了对通信有一个更深入的认识,我们也来简单了解一下其自下而上的对应吧。依次为:
- NV硬件连接层:PCIe / NVLink / IB
- NV中间软件通信库:NCCL
- 上层封装接口:torch.distributed
其中通信又可分为:
- 机器内通信(Intra-Machine Communication)
- 机器间通信(Inter-Machine Communication)
例如我们说“一个模型用32张GPU训练”时,它可能实际的部署方式可能是这样:
- 单节点多GPU:一台服务器(节点)包含多块GPU(例如NVIDIA DGX H100每节点8卡)
- 多节点集群:多个节点互联,每节点 8 张 GPU,4 个节点共构成 32-GPU 训练系统
2.1 PCIe / NVLink / IB 硬件连接
此部分可简单总结为:机器内GPU-GPU互联用NVLink,GPU和其他硬件(如CPU)互联用PCIe,跨机器互联可以使用IB (InfiniBand)作为硬件支持(也可以只用RoCE + 高速以太网)。
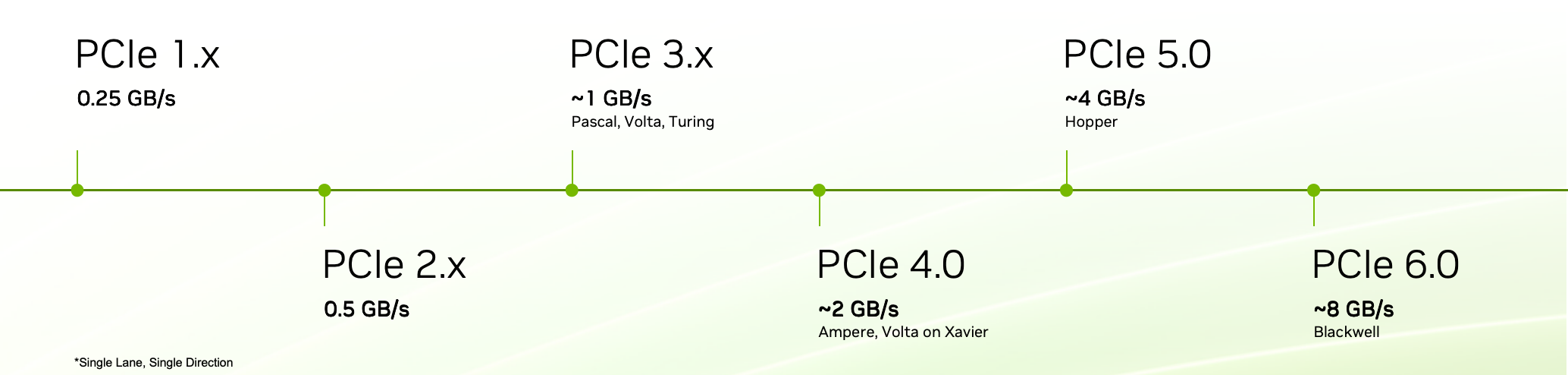
【PCIe】 (Peripheral Component Interconnect Express)
- 标准的高速总线接口,用于连接 GPU、加速器卡等设备
- 传统 PCI 总线:同时间只能单向传输;PCIe:可双向同时通信
- 通常作为 CPU 与 GPU、网卡之间的连接通道
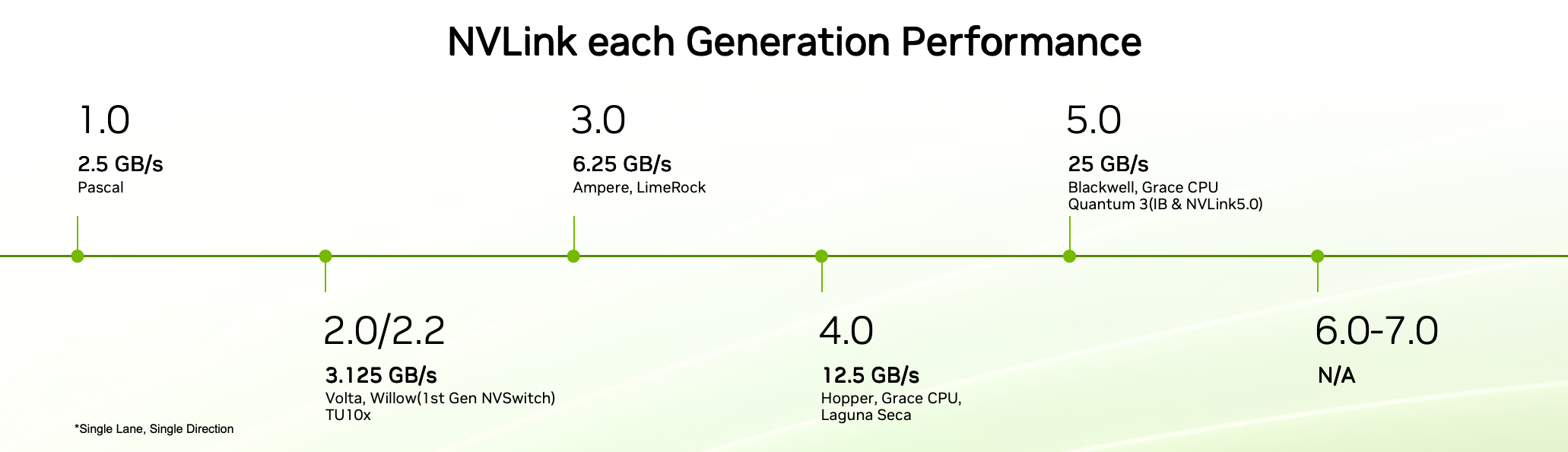
【NVLink】
- NVLink 是一种由 NVIDIA 开发的高速互连协议技术,可实现 GPU 之间的直接通信
- NVLink 可以提供比普通 PCIe 更高的带宽和更低的延迟,NVSwitch是基于NVLink的交换设备
- 硬件设计:
- GPU 同时具备 NVLink 接口和 PCIe 接口
- NVLink 专用于 GPU-GPU 直连,PCIe 用于连接 CPU、网卡、存储等
【IB】(InfiniBand)
- 一种高带宽、低延迟的网络通信协议
- 支持 RDMA(远程直接内存访问),适用于分布式训练场景
- NV生态:
- GPUDirect RDMA:允许IB网卡直接访问GPU显存,加速跨节点GPU通信(如分布式训练)
- NCCL优化:NCCL库优先选择InfiniBand路径,实现高效的跨节点集合通信
【实例分析:机器内/间通信】
- 机器内通信
- 相关通信硬件:PCIe / NVLink
- 硬件配置(以 NVIDIA DGX H100 为例)
- 设备:2 CPU + 8 GPU
- 互连方式:
- GPU-GPU:通过 NVLink 4.0 全互连(每 GPU 有 18 条 NVLink 通道)
- GPU-CPU/其他设备:通过 PCIe 5.0 x16 连接
- 机器间通信
- 相关通信硬件:使用IB / 不用IB
- 硬件配置
- 单节点配置(共4个):2 CPU + 8 GPU
- 网络拓扑:4 个节点通过 InfiniBand 交换机互联
- 额外注意点
- IB互联是硬件上的互联了,性能好,但需要修改硬件,灵活性不算特别高
- 软件层可替代 InfiniBand 的方案:RoCE(RDMA over Converged Ethernet)+ 高速以太网
2.2 NCCL 通信软件库
NCCL是Nvidia Collective multi-GPU Communication Library的简称(发音为"Nickel"),它是一个实现多GPU的collective communication通信(all-gather, reduce, broadcast)库。NV做了很多优化,以在PCIe、Nvlink、InfiniBand上实现较高的通信速度。
NCCL实现了集体通信(collective communication)和点对点(point to point)发送/接收原语。主要有:
-
Collective Operations(与第 1 节中通信原语对应)
-
AllReduce, Broadcast, Reduce, AllGather, ReduceScatter...
-
它们做了hardware awareness的优化,实现高效通信
-
Group Calls
-
多 GPU 在单线程中操作时,需要通过 group call 保证同步性与死锁避免
- 核心函数:
ncclGroupStart()和ncclGroupEnd(),用于将多个通信操作合并为原子性执行组 - 用途:
- 多 GPU 单线程管理,避免死锁
- 通信操作聚合,减少启动开销
- 复杂点对点模式融合,将多个
ncclSend()和ncclRecv()合并为单一操作组

-
Point-To-Point Communication
-
核心函数:
ncclSend()和ncclRecv(),需成对调用且参数一致 - 举例:
- Sendrecv:两个 Rank 同时发送和接收数据
- One-to-All:单 Rank 向所有其他 Rank 分发数据(Scatter)
- All-to-One:所有 Rank 向单 Rank 聚合数据(Gather)
- All-to-All:每个 Rank 与其他所有 Rank 交换数据
- Neighbor Exchange:在网格拓扑中与相邻 Rank 通信
NCCL也有预先的环境设置(System Configuration),通过环境变量优化通信行为,一些关键配置举例:
| 类别 | 环境变量 | 作用 |
|---|---|---|
| 网络接口选择 | NCCL_SOCKET_IFNAME |
指定使用的 IP 接口(如 eth0),绕过自动选择。 |
NCCL_IB_HCA |
指定使用的 InfiniBand/RDMA 设备(如 mlx5_0,mlx5_1)。 |
|
NCCL_IB_GID_INDEX |
在 RoCE 网络中指定 GID 索引(通常设为 3)。 |
|
| 协议与传输层 | NCCL_SOCKET_FAMILY |
强制使用 IPv4/IPv6(设为 AF_INET 或 AF_INET6)。 |
NCCL_PROTO |
指定通信协议(如 SIMPLE,LL,LL128),默认自动选择最优。 |
|
| 线程与资源 | NCCL_SOCKET_NTHREADS |
设置每个网络连接的 CPU 辅助线程数(默认 2,增大可提升吞吐但增加延迟)。 |
NCCL_NSOCKS_PERTHREAD |
控制每个线程管理的 Socket 数量(调整网络连接并发度)。 |
2.3 torch.distributed 前端
Pytorch 中通过 torch.distributed 包提供分布式支持,包括 GPU 和 CPU 的分布式训练支持。
【部分并行API】
- Distributed Data-Parallel (DDP):
torch.distributed.DistributedDataParallel - Fully Sharded Data-Parallel Training (FSDP):
torch.distributed.fsdp - Tensor Parallel (TP):
torch.distributed.tensor.parallel - Pipeline Parallel (PP):
torch.distributed.pipelining
【支持的3种后端】
- MPI:CPU,需要安装MPI 库(如 OpenMPI)
- NCCL:GPU,效率最高,推荐优先使用
- Gloo:Facebook 提供的通信库,兼容 CPU/GPU,但 GPU 表现不佳,CPU 略逊于 MPI
【相关概念及定义】
- Process 进程:每个训练进程,独立执行模型训练,仅交换必要数据(如梯度)
- Group 进程组:是我们所有进程的子集。默认情况下,只有一个组(所有进程的全集)
- Backend:通信后端,支持 NCCL、GLOO、MPI
- world_size:在进程组中的进程数
- Rank 秩:表示进程序号,用于进程间通讯,表征进程优先级。
rank = 0的主机为master节点,范围为[0, world_size -1] - local_rank:进程内的GPU编号,非显式参数。例如:
rank = 3,local_rank = 0表示第 3 个进程内的第1块GPU
2.4 Torch.distributed 实例
在 PyTorch 中,使用 torch.distributed 进行分布式训练通常遵循以下基本流程(对应步骤已在代码中标注):
- 初始化进程组
使用
init_process_group()初始化通信环境,这是使用torch.distributed的前置步骤,必须在调用任何其他分布式函数之前完成。 - 创建子进程组(可选)
如需在一个训练任务中进行子组级别的通信,可通过
new_group()创建子分组(例如在模型并行中应用)。 - 构建分布式模型封装器
将模型封装为
DistributedDataParallel(即DDP(model, device_ids=device_ids)),以实现梯度同步与自动通信优化。 - 为数据加载器配置分布式采样器
使用
DistributedSampler为训练数据集创建采样器,确保每个进程加载互不重复的数据子集。 - 启动多进程训练脚本
使用
torch.distributed.launch或推荐的torchrun工具,在每台主机上启动训练脚本,分配不同的rank。 - 训练结束后销毁进程组(推荐)
使用
destroy_process_group()清理通信资源,确保程序正常退出。
def train(rank, world_size):
# 1. 初始化进程组
# 没有设置小组内集体通信
dist.init_process_group(
backend="gloo",
init_method="tcp://localhost:12355",
rank=rank,
world_size=world_size
)
# 设置设备
device = "cpu"
print(f"Rank {rank} using device: {device}")
# 2. 创建模型 + DDP封装
model = SimpleModel().to(device)
model = DDP(model)
# 3. 数据加载器 + 分布式采样器 Sampler
dataset = DummyDataset()
sampler = DistributedSampler(dataset, num_replicas=world_size, rank=rank)
dataloader = DataLoader(dataset, batch_size=8, sampler=sampler)
# 优化器
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 简单训练循环(2个epoch)
for epoch in range(2):
sampler.set_epoch(epoch)
for x, y in dataloader:
x, y = x.to(device), y.to(device)
output = model(x)
loss = nn.CrossEntropyLoss()(output, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if rank == 0:
print(f"Rank {rank}, Epoch {epoch}, Loss: {loss.item():.4f}")
# 6. 结束后销毁进程组
dist.destroy_process_group()
################### Step 4: 函数入口 ###################
# 5. 启动入口
if __name__ == "__main__":
world_size = 2
# 启动多进程
torch.multiprocessing.spawn(
train,
args=(world_size,),
nprocs=world_size,
join=True
)
由于之前说的只有单GPU的问题,我用了CPU + gloo后端。它的output:
Rank 1 using device: cpu
Rank 0 using device: cpu
Rank 0, Epoch 0, Loss: 0.5726
Rank 0, Epoch 1, Loss: 0.8204
3. 单卡训练计算流
此处假定你已经熟悉了一些训练的基础术语和流程,以下是部分关键概念的回顾:
- 常见术语
- Batch Size:每次前向和反向传播处理的数据样本数
- 1 Iteration = 处理 1 个 Batch 并完成一次参数更新
- 1 Epoch:表示完整遍历一次所有训练数据
- Learning rate:weight在某方向上改变的步长,$ W' = W - \eta * f(\nabla W)$
- 优化器 optimizer - \(f(\nabla W)\)
- SGD (随机梯度下降),默认不包含动量;在 PyTorch 中可通过
momentum参数开启 - RMSProp(自适应梯度缩放),简言之引入了norm(通过梯度平方的指数移动平均自适应调整学习率)
- Adam(Adam = Momentum + RMSProp 的结合体)
- Learning Rate Scheduler 学习率调度器
- 学习率 \(\eta\) 大:收敛快,但可能跳过最优点
- 学习率 \(\eta\) 小:稳定但慢,可能卡住不动
- 调度器的作用:根据训练进度动态调整学习率
3.1 模型训练过程
在扩展到多 GPU 之前,让我们先快速回顾在单卡 GPU 上训练模型的基本流程。单卡训练中,单层通常包括三步:
- 前向传播(forward pass):输入数据通过模型,得到输出
- 反向传播(backward pass):计算梯度
- 权重更新(weight update):利用梯度更新权重等参数
一个标准流程:Forward → Loss → Backward (update parameters)
让我们以一个典型的多层感知机(MLP,含多个Linear Layer)为例,来看看计算的具体流程。
【Forward Pass】
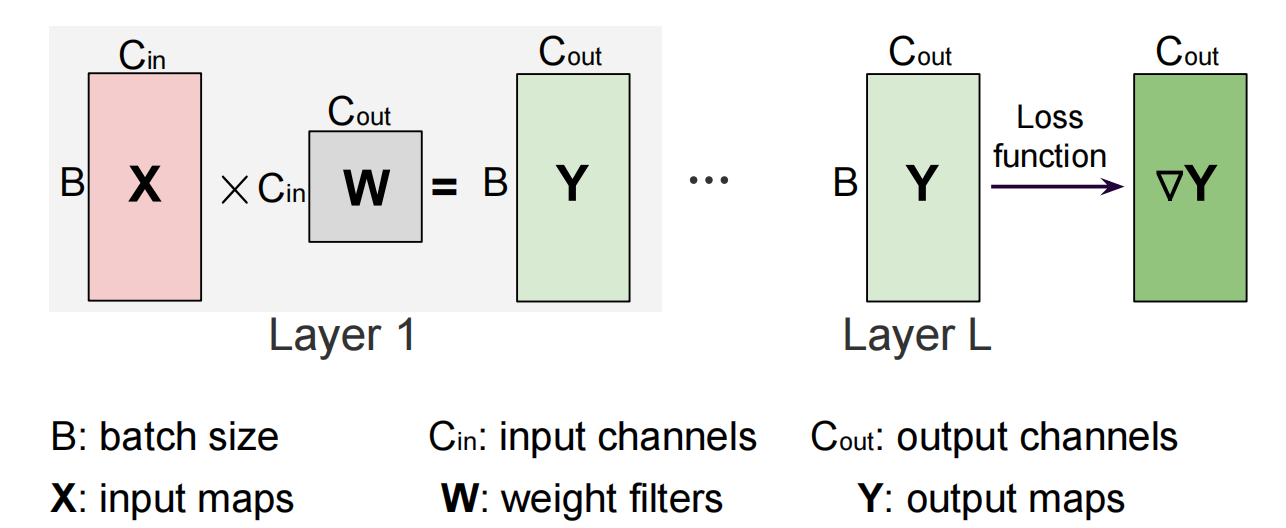
- Linear Layer 计算公式:\(X @ W= Y\)
- 存储需求:
- weight (W, b):必须存储
- Activation (X - 上一层的output,Y - 本层的output):存储视后向的计算需求而定(后面会详细讲)
- 注意:PyTorch 中偏置项 \(b\) 的加法自动广播至 batch 维度,无需显式扩展
【所有Forward结束后 - 计算Loss】
- Loss 的本质:损失函数的作用是衡量模型最终输出与真实标签之间的差距
- 反向传播的起点:Loss 是反向传播的起点,计算 Loss 后,通过链式法则(自动微分)逐层回传梯度,最终更新所有层的参数
- 常见 Loss 类型:
- 分类任务:交叉熵损失(Cross-Entropy Loss)
- 回归任务:均方误差(MSE Loss)、L1 Loss
- 计算公式:
- $ L = Loss(Y)$ - 使用真实label计算
- \(\nabla Y = \frac{\partial L}{\partial Y}\) - 反向第一步梯度计算
【Backward Pass】
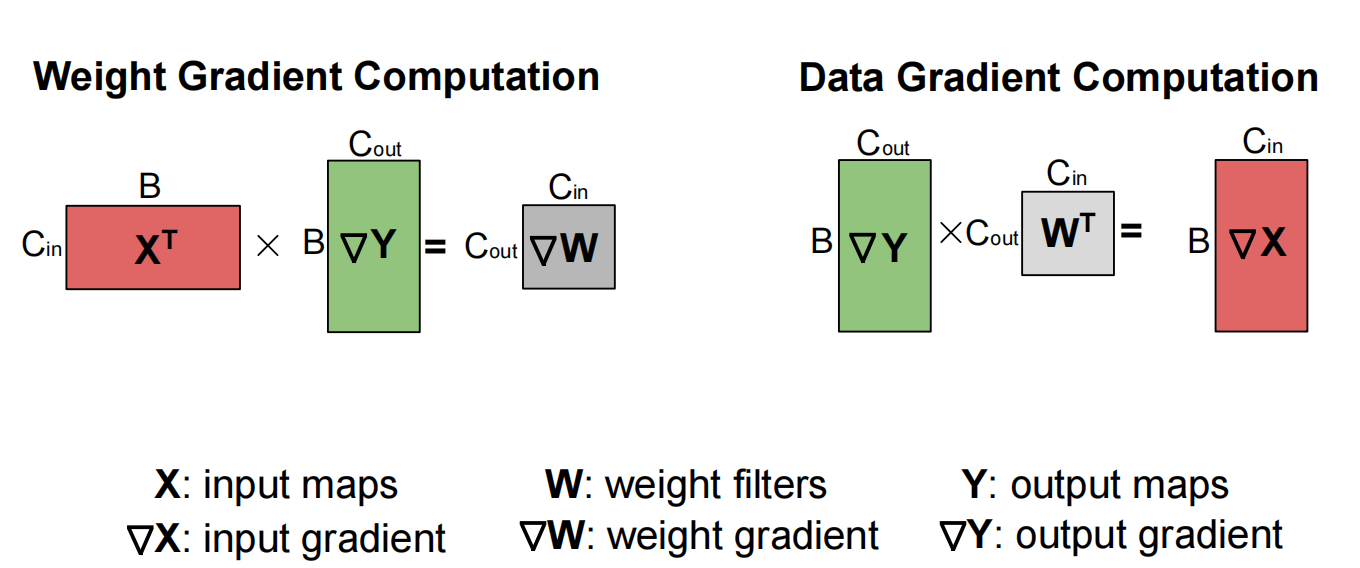
- 根据链式法则,计算对所有input和weight的权重
- Linear Layer 计算公式:
- \(\nabla W = X^T @ \nabla Y\) (用于更新W)
- $ \nabla X = \nabla Y @ W^T$ (用于辅助前一层的计算)
【Weight Updates】
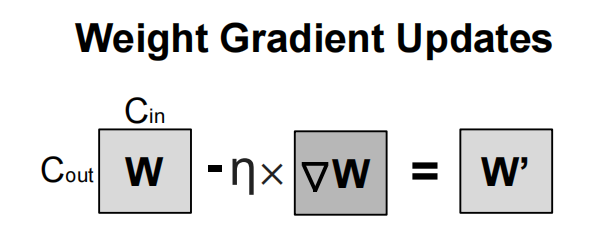
- 计算公式:$ W' = W - \eta * f(\nabla W)$
- 学习率(\(\eta\)):通常由优化器(如 torch.optim.SGD)控制。
- 优化器的作用:实际训练中可能使用更复杂的更新规则(如动量、Adam),但上面的公式表示的是最基础的 SGD
3.2 Transformer 中的显存使用
【回顾:Model 计算流】
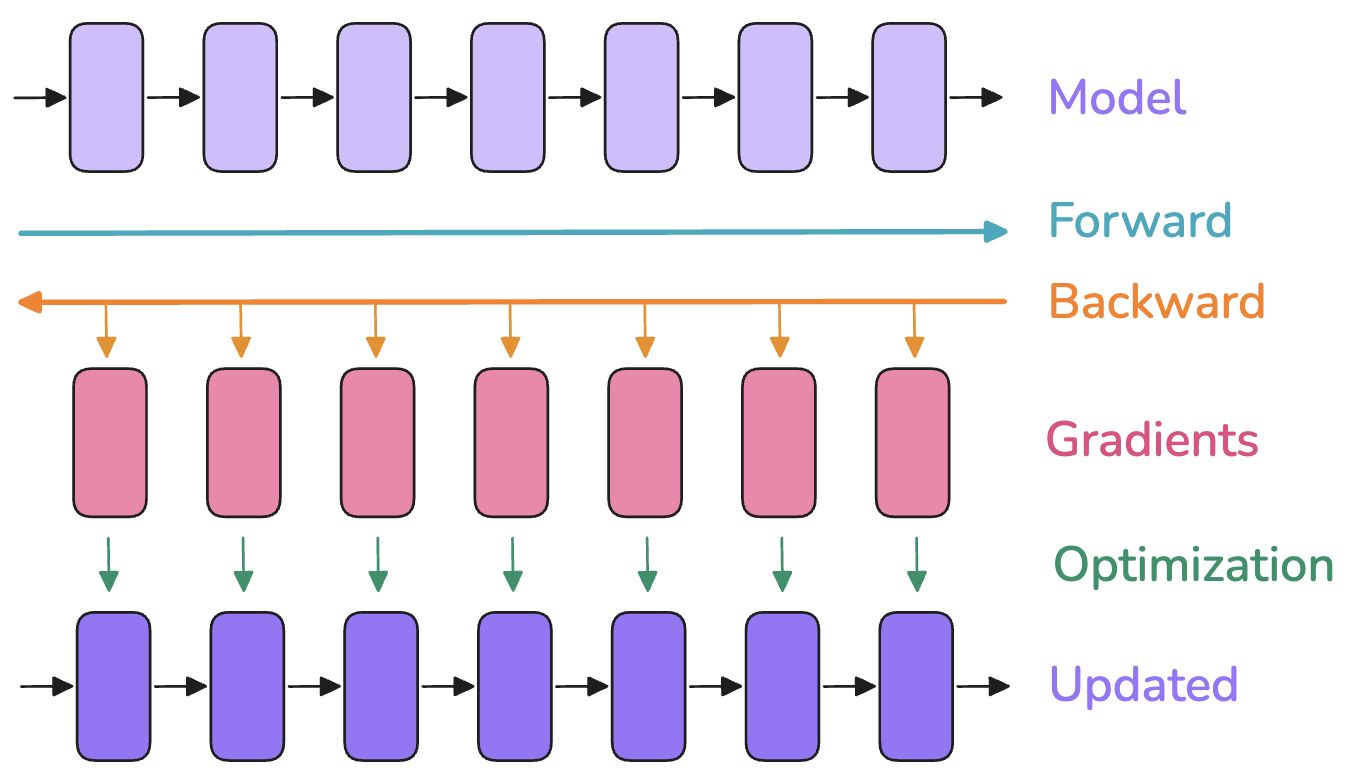
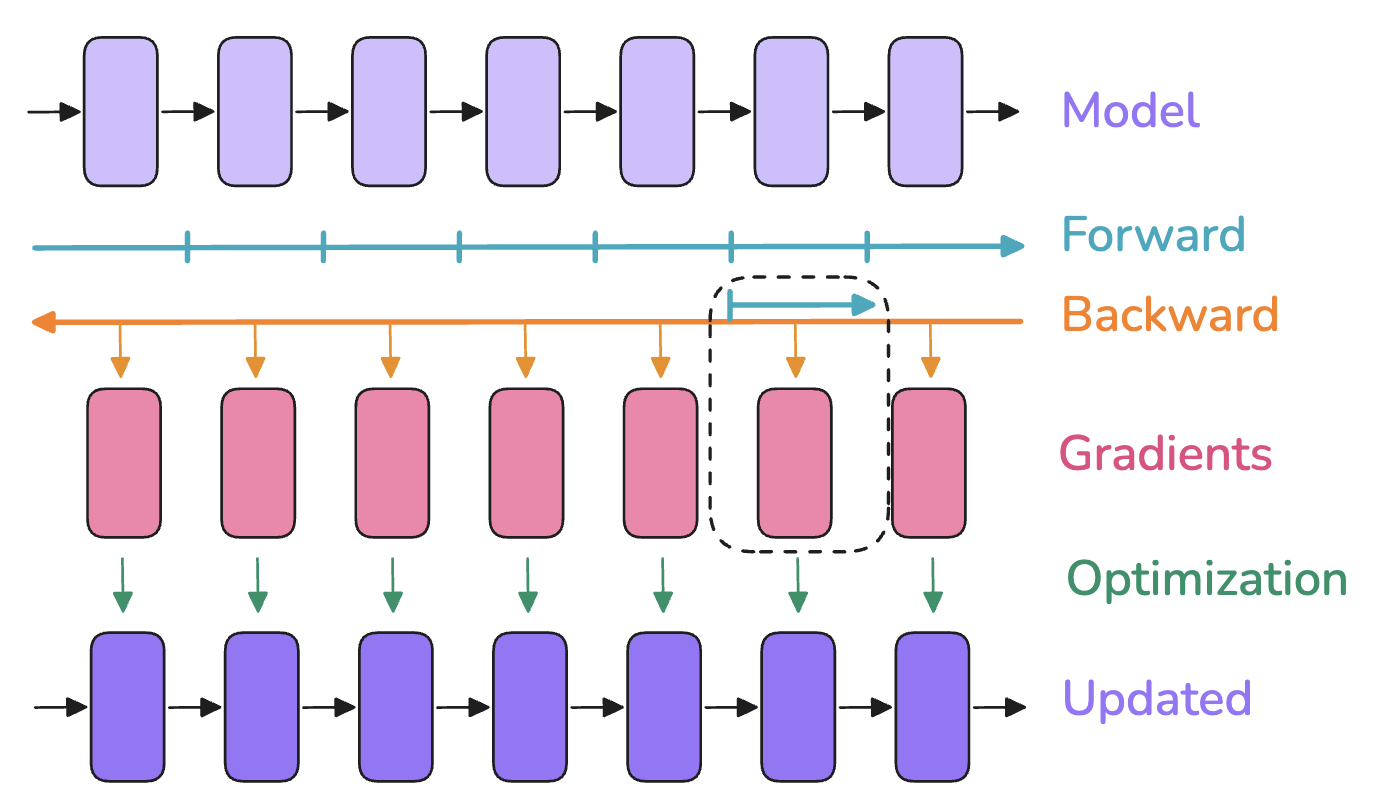
我们刚刚以简单的batch_size = 1 的 MLP 为例梳理了训练过程。实际上,无论是 MLP 还是 Transformer,其训练过程都可以抽象为以下阶段:
- 一个Model由多层组成,执行:
- Forward 前向传播(多层) -> 计算loss -> 开始后向
- Backward后向传播
- 每层计算对input的gradient,以用于传给上一层
- 每层计算对weight参数的gradient,以用于更新weight
- 使用计算出的gradient,选择optimizer,更新weight
- $ W' = W - \eta * f(\nabla W)$
【显存占用】
在训练神经网络模型时,一般需要存储:
- 模型权重 (weights, \(W\))
- 模型梯度 (gradients, \(\nabla W\))
- 优化器状态 (optimizer states):如动量、方差等
- 用于反向传播的激活值 (activations, \(X\) & \(Y\))
- 大小和batch size 成正比(实际是\(BX\) & \(BY\))
- 需要临时计算并存储它们的Gradient(\(\nabla X\) & \(\nabla Y\))
- 可选择性保留或动态释放
这些需要存储的项目以Tensor的形式存在,不同Tensor有不同的 形状(shape)和 **精度(precision),直接影响其内存占用:
- 形状:由例如 batch size、序列长度、模型隐层维度、注意力头数、词表大小,以及是否进行模型切分等超参数决定
- 精度:对应 FP32、BF16 或 FP8 等格式,会影响每个元素所占的字节数(4、2 或 1 字节)
- 混合精度训练就是其优化的一个方向
- 也有的优化保存两份weight(高精度+低精度),低精度用于优化计算,同时高精度的保存又能尽量减少精度损失
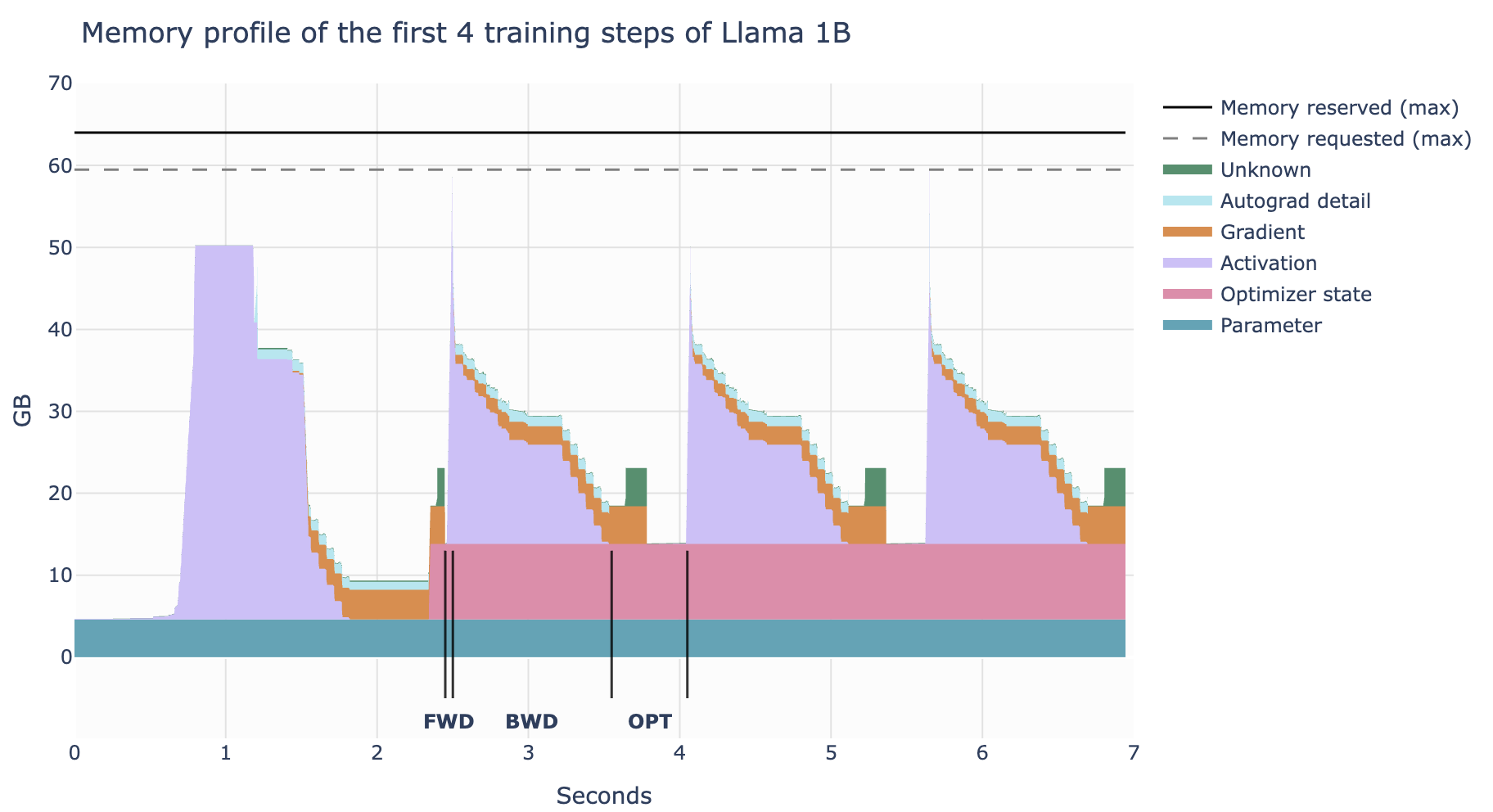
【分析显存使用】
借助 PyTorch 的 profiler 工具,我们可以查看训练过程中不同阶段的显存分配。
发现显存使用并非静态,而是在训练过程(尤其是单个 Iteration 内)不断变化:
- 前向传播时,会随着激活值的产生,显存占用快速上涨
- 在反向传播时,梯度逐渐累加,但之前存储的激活值可以逐步释放
- 优化步骤,此时需要所有梯度,然后更新优化器状态,此时暂存的计算值临时上升
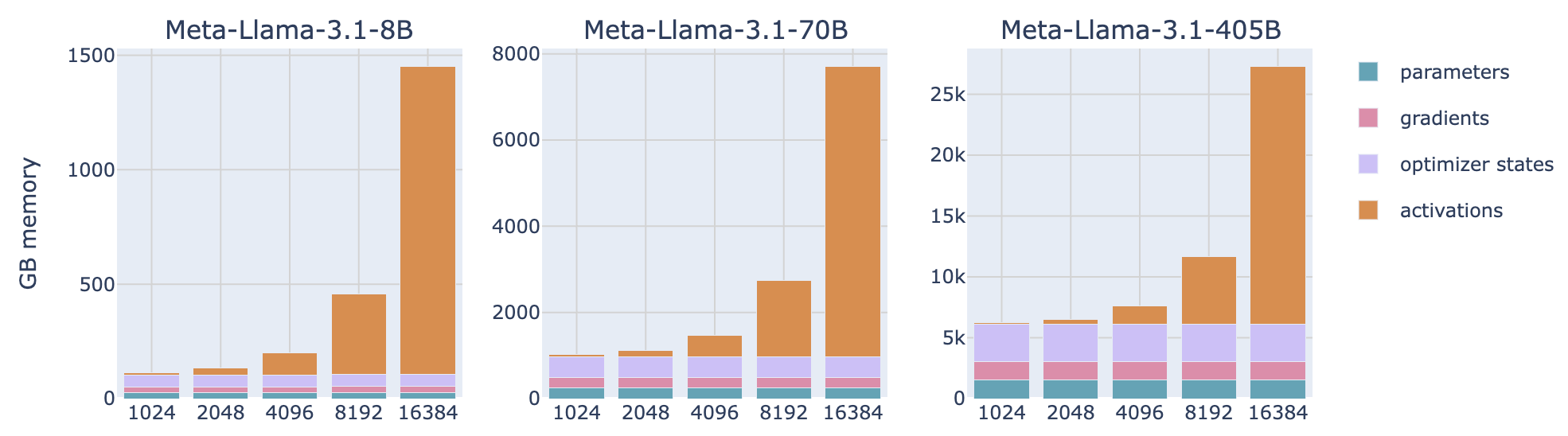
【权重、激活值、梯度和优化器状态的显存】
其实可以计算具体的数值,但我认为太过于细节了所以略过了,如果你感兴趣细节可以查看 这里
-
相对固定的3个
-
模型权重 \(N\):
- 和精度选取有关,如果都使用FP32(4 byte),则 \(m_{para} = 4N\)

-
梯度亦然:\(m_{grad} = 4*N\)
-
优化器状态:
- 优化器在使用 Adam 时,需要存储动量和方差各 4 字节,还会加上一些管理用的结构。总结起来
- \(m_{opt} = (4+4)*N\)
-
激活值占用:
-
重点:随
batch_size,seq_len线性增长 - 在计算图中随时变化,周期性分配和释放
- 对于大输入 tokens(即大 batch size/长序列),激活值会成为主要的显存负担。

3.3 Activation优化 - 激活重计算
根据上一步我们发现,Activation对显存的影响很大!
为应对激活值高占用的问题,可使用 激活重计算 技术(又称 Gradient Checkpointing 或 Rematerialization)。
核心思想是:在前向传播时丢弃部分激活值,从而省显存;需要它们做反向传播时,再运行一次子前向过程把它们计算回来,换取多一些计算量来节省显存。
- 若不开启重计算:我们会在每个可学习操作(比如 feed-forward,layernorm 等)之间都保存激活值
- 启用重计算后:我们只保存少量关键位置的激活值;当反向传播需要时,再用已保存的进行部分前向运算重算出所需内容。
3.4 Activation优化 - 梯度累加
已知Activation还正比于 batch_size 所以还有一个节省Activation的技巧 —— 梯度累加(Gradient accumulation),用于避免因过大 batch size 带来的显存爆炸。
思路:把原本的一次大 batch,拆成多个更小的 micro-batch
- 每次处理一个小 batch,执行前向 + 反向并累加梯度
- 把这些梯度累加起来,最后再做一次优化器更新(
optimizer.step())
效果:
- 存储需求:只需要 micro-batch的activation + gradient
- 缺点:每个优化步骤需要重复多次前后向,因此增加了计算量,放慢了训练速度🤔
4. 代码实现
本章节我们先来熟悉一下torch.distributed 的使用吧,在接下来的分布式代码详解中我都会使用这个库。
不过值得注意的是:
torch.distributed支持三种后端:nccl、mpi、gloo,正常的多GPU分布式应该用NCCL后端(在“2. 通信方式(软硬件)-> torch.distributed 前端”部分也有讲解)- 但是由于我用的是免费的Google Colab(最多提供 1 个免费 GPU 😭),因此后续部分示例将使用 GLOO 后端+ CPU 模拟(不选 MPI 是因为配置略繁琐)
4.1 通信原语测试
【结构搭建】
在 PyTorch 中,使用 torch.distributed 进行分布式训练通常遵循以下基本流程(对应步骤已在代码中标注):
- 初始化进程组
使用
init_process_group()初始化通信环境,这是使用torch.distributed的前置步骤,必须在调用任何其他分布式函数之前完成。 - 创建子进程组(可选)
如需在一个训练任务中进行子组级别的通信,可通过
new_group()创建子分组(例如在模型并行中应用)。 - 构建分布式模型封装器
将模型封装为
DistributedDataParallel(即DDP(model, device_ids=device_ids)),以实现梯度同步与自动通信优化。 - 为数据加载器配置分布式采样器
使用
DistributedSampler为训练数据集创建采样器,确保每个进程加载互不重复的数据子集。 - 启动多进程训练脚本
使用
torch.distributed.launch或推荐的torchrun工具,在每台主机上启动训练脚本,分配不同的rank。 - 训练结束后销毁进程组(推荐)
使用
destroy_process_group()清理通信资源,确保程序正常退出。
【我设置的对应setting函数】
共用的参数设置为了库函数:
(1) 初始化进程组:init_process_group() 初始化通信环境
(6) 训练结束后销毁进程组
剩下的那些,由于此处是一个通信源语的test所以:
(2) 没有选择子进程组
(3)(4) 不是模型,不用封装model和数据sampler
(5) 启动器:torchrun 是正式推荐的,用于训练任务;但此处用了mp.spawn() ,是轻量、灵活的调试工具
%%writefile dist_utils.py
import os
import torch
import torch.distributed as dist
def setup(rank, world_size, port=12355):
dist.init_process_group(
backend='gloo',
init_method=f'tcp://127.0.0.1:{port}',
rank=rank,
world_size=world_size
)
def cleanup():
dist.destroy_process_group()
【各类通信原语示例】
值得注意的是:
- 使用
log代替显式的print,可以自动加flush=True,避免 spawn/join 卡死 - 在原语后添加
dist.barrier()有助于解决结束时的同步和锁死问题
%%writefile commu_funcs.py
import torch
import torch.distributed as dist
import torch.multiprocessing as mp
import time
import sys
from dist_utils import setup, cleanup
# ------------------- 打印封装 ----------------------
def log(msg, rank=None):
prefix = f"[Rank {rank}] " if rank is not None else ""
print(f"{prefix}{msg}", flush=True)
# ------------------- 通信原语 ----------------------
def example_broadcast(rank):
tensor = torch.tensor([1, 2, 3, 4, 5], dtype=torch.float32) if rank == 0 else torch.zeros(5)
log(f"Before Broadcast: {tensor}", rank)
dist.broadcast(tensor, src=0)
log(f"After Broadcast: {tensor}", rank)
dist.barrier()
def example_reduce(rank):
tensor = torch.tensor([rank + 1] * 5, dtype=torch.float32)
log(f"Before Reduce: {tensor}", rank)
dist.reduce(tensor, dst=0, op=dist.ReduceOp.SUM)
log(f"After Reduce: {tensor}", rank)
dist.barrier()
def example_all_reduce(rank):
tensor = torch.tensor([rank + 1] * 5, dtype=torch.float32)
log(f"Before AllReduce: {tensor}", rank)
dist.all_reduce(tensor, op=dist.ReduceOp.SUM)
log(f"After AllReduce: {tensor}", rank)
dist.barrier()
def example_gather(rank):
tensor = torch.tensor([rank + 1] * 5, dtype=torch.float32)
gather_list = [torch.zeros(5) for _ in range(dist.get_world_size())] if rank == 0 else None
log(f"Before Gather: {tensor}", rank)
dist.gather(tensor, gather_list, dst=0)
if rank == 0:
log(f"After Gather: {gather_list}", rank)
dist.barrier()
def example_all_gather(rank):
tensor = torch.tensor([rank + 1] * 5, dtype=torch.float32)
gather_list = [torch.zeros(5) for _ in range(dist.get_world_size())]
log(f"Before AllGather: {tensor}", rank)
dist.all_gather(gather_list, tensor)
log(f"After AllGather: {gather_list}", rank)
dist.barrier()
def example_scatter(rank):
if rank == 0:
scatter_list = [torch.tensor([i + 1] * 5, dtype=torch.float32) for i in range(dist.get_world_size())]
log(f"Rank 0 Scatter List: {scatter_list}", rank)
else:
scatter_list = None
tensor = torch.zeros(5)
log(f"Before Scatter: {tensor}", rank)
dist.scatter(tensor, scatter_list, src=0)
log(f"After Scatter: {tensor}", rank)
dist.barrier()
def example_reduce_scatter(rank):
world_size = dist.get_world_size()
input_list = [torch.tensor([(rank + 1) * (j+1)] * 2, dtype=torch.float32) for j in range(world_size)]
output_tensor = torch.zeros(2)
log(f"Before ReduceScatter: {input_list}", rank)
dist.reduce_scatter(output_tensor, input_list, op=dist.ReduceOp.SUM)
log(f"After ReduceScatter: {output_tensor}", rank)
dist.barrier()
def example_barrier(rank):
log(f"Sleeping {rank} seconds...", rank)
time.sleep(rank)
dist.barrier()
log(f"Passed barrier.", rank)
# ------------------- 启动器 ----------------------
def run(rank, world_size, op_name):
setup(rank, world_size)
try:
ops = {
"broadcast": example_broadcast,
"reduce": example_reduce,
"all_reduce": example_all_reduce,
"gather": example_gather,
"all_gather": example_all_gather,
"scatter": example_scatter,
"reduce_scatter": example_reduce_scatter,
"barrier": example_barrier
}
if op_name not in ops:
if rank == 0:
print(f"[Rank {rank}] Unknown operation: {op_name}", flush=True)
else:
ops[op_name](rank)
except Exception as e:
log(f"Exception: {e}", rank)
finally:
try:
cleanup()
except Exception as e:
log(f"Cleanup failed: {e}", rank)
sys.exit(0) # 显式退出
# ------------------- 可执行入口 ----------------------
if __name__ == "__main__":
import sys
op = sys.argv[1] if len(sys.argv) > 1 else "broadcast"
world_size = 3
mp.spawn(run, args=(world_size, op), nprocs=world_size, join=True)
【调用运行参考】
[Rank 1] Before Broadcast: tensor([0., 0., 0., 0., 0.])
[Rank 2] Before Broadcast: tensor([0., 0., 0., 0., 0.])
[Rank 0] Before Broadcast: tensor([1., 2., 3., 4., 5.])
[Rank 1] After Broadcast: tensor([1., 2., 3., 4., 5.])
[Rank 2] After Broadcast: tensor([1., 2., 3., 4., 5.])
[Rank 0] After Broadcast: tensor([1., 2., 3., 4., 5.])
4.2 自定义分布式训练测试
同前面的“结构搭建”部分。
【我设置的对应setting函数】
把共用的参数设置为了库函数:
(1) 初始化进程组:init_process_group() 初始化通信环境
(2) 没有选择子进程组
(3)写了个模型,定义为了库函数
(4)写了个简单的数据集,并且定义了数据sampler
(6) 训练结束后销毁进程组
此外,同上:
(5) 启动器:torchrun 是正式推荐的,用于训练任务;但此处用了mp.spawn() ,是轻量、灵活的调试工具
%%writefile ddp_utils.py
import torch
import torch.nn as nn
import torch.optim as optim
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.utils.data import Dataset, DataLoader
from torch.utils.data.distributed import DistributedSampler
# ------------------ 强制 CPU 模式 ------------------
torch.cuda.is_available = lambda: False
# ------------------ 1. 通信初始化 ------------------
def setup(rank, world_size, method="tcp://localhost:12355"):
dist.init_process_group(
backend="gloo",
init_method=method,
rank=rank,
world_size=world_size
)
# ------------------ 3. 模型 ------------------
class SimpleModel(nn.Module):
def __init__(self):
super().__init__()
self.layer = nn.Linear(10, 2)
def forward(self, x):
return self.layer(x)
# ------------------ 4. 数据集 & Sampler ------------------
class DummyDataset(Dataset):
def __len__(self):
return 100
def __getitem__(self, idx):
return torch.randn(10), torch.randint(0, 2, (1,)).item()
def get_sampler(dataset, world_size, rank):
return DistributedSampler(dataset, num_replicas=world_size, rank=rank)
# ------------------ 6. 销毁进程组 ------------------
def cleanup():
dist.destroy_process_group()
【分布式训练主体】
%%writefile ddp_simple.py
import torch
import torch.nn as nn
import torch.optim as optim
import torch.multiprocessing as mp
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.utils.data import DataLoader
from ddp_utils import setup, cleanup, SimpleModel, DummyDataset, get_sampler
################### 分布式训练定义 ###################
def train(rank, world_size, epochs):
# 1. 初始化进程组
setup(rank, world_size)
# 设置设备
device = "cpu"
print(f"[Rank {rank}] initialized", flush=True)
# 3. 创建模型 + DDP封装
model = SimpleModel().to(device)
model = DDP(model)
# 4. 数据加载器 + 分布式采样器 Sampler
dataset = DummyDataset()
sampler = get_sampler(dataset, world_size, rank)
dataloader = DataLoader(dataset, batch_size=8, sampler=sampler)
# 优化器
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 简单训练循环(2个epoch)
for epoch in range(epochs):
sampler.set_epoch(epoch)
for x, y in dataloader:
x, y = x.to(device), y.to(device)
output = model(x)
loss = nn.CrossEntropyLoss()(output, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if rank == 0:
print(f"[Rank {rank}] Epoch {epoch}, Loss: {loss.item():.4f}", flush=True)
# 6. 销毁进程组
cleanup()
################### 函数入口 ###################
# 5. 启动入口
if __name__ == "__main__":
world_size = 2
epochs = 2
mp.spawn(train, args=(world_size, epochs), nprocs=world_size, join=True)
【调用运行】
参考资料 & 结语
【参考资料】
- NYU CSCI-GA.3033-077 Big Data and Machine Learning Systems 相关课件
- NYU CSCI-GA.3033-9483 Efficient AI and Hardware Accelerator Design 相关课件
- 相关帖子:知乎:Pytorch 分布式训练
【结语】
本节内容就先到这里咯,之所以整理这部分分布式基础,是因为我感觉直接进入各类分布式策略的paper reading会有一些理解不透彻的问题(正如去年读了那些paper的我一样)。
所以说,回到第一性原理的角度去理解通信与计算流程,真的很重要。下节DP再见!