01-常见CUDA手写实现(with code)
[Quick Ref for 手写code]:一些基础CUDA算子 | ipynb | Colab
前言
本来第二部分准备写并行的,但是最近面试国内,就还是先复习一下CUDA好了!
根据之前的经验,常见会问到的CUDA手写题包括:
- Add 加法(1D/2D)- elementwise
- matMul 矩阵乘(naive/tiled)
- Transpose 转置
- Sum Reduce 规约(1D/2D行列,naive/折半归约/warp shuffle)
以下则是一些可能问到的:
- Softmax规约
- Conv 卷积
- Layer Norm
Plus:Float4向量化也需要会写,原本以为不太需要,结果在考reduce时被问了一次(故此处所有的都加上了合并访存版,elementwise和reduce系列都比较适合float4)。
可以在这里进行练习,但有点怀疑它只能过编译:leedcode for CUDA
其他参考资料:
- NYU CSCI-GA.3033-077 Big Data and Machine Learning Systems 相关课件
- 相关帖子:https://zhuanlan.zhihu.com/p/12661298743;https://zhuanlan.zhihu.com/p/678903537
先准备这些常见的吧!我都加了 Test case,可以下载 ipynb 文件(或在 Colab 上)运行(CUDA 部分需要 GPU 环境)。
plus:频率是从面intern的角度来评价的。
说明
面试时不会提供运行环境,也不会要求自己写test case运行,一般来说只要写出kernel函数和调用函数即可。
【通常是分3步走🤔】
-
宏定义:ceilling函数 / 全局定义BLOCKSIZE / float4向量化访问
-
&(value)取得value的内存地址,reinterpret_cast<float4*>将该地址强制转换为float4*类型的指针 -
最终将
value的内存当作float4对象使用,四个元素依次用x,y,z,w访问
# define CEIL(a, b) ((a + b - 1) / (b))
#define FLOAT4(value) (reinterpret_cast<float4*>(&(value))[0])
- 实现调用函数 - threadPerBlock, blockPerGrid, <<<>>>, cudaDeviceSynchronize
- 实现kernel函数(定义一个block里的每个thread要做什么)
【为什么kernel函数是定义每个block的呢?】这涉及到 SM 如何调度线程执行:
- Block是逻辑调度单元:一个block分配给一个SM,SM内部按warp调度。
-
Warp:每个warp包含32个线程,SM以warp为最小单位进行调度。
-
重要的一点:关于Idx的顺序,threadIdx.y对应tensor中的row,threadIdx.y对应tensor中的col。
【float4类型合并访存】
- 使用float4类型访存,用向量化的LDG.128和STG.128指令从DRAM一次读4个元素,以减少指令数(读ptx层就能看到这些指令)
- 为什么是float4?
- PTX指令集(GPU底层指令)仅明确定义了
LDG.32、LDG.64和LDG.128,128是最大的 - 128是指 128 bits,float32 = 32 bits,128/32 = 4
1. Add
考察频率:中。
一般都直接上矩阵乘,简单的考Add反而少,but去年面NV考过。
1.1 1D vecAdd
# define BLOCKSIZE 1024
// input: A[N],B[N] -> output: C[N]
__global__ void vecAddKernel(float *A, float *B, float *C, int N){
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N){
C[idx] = A[idx] + B[idx];
}
}
void vecAdd(float *A, float *B, float *C, int N){
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(N, BLOCKSIZE));
vecAddKernel<<<blockPerGrid, threadPerBlock>>>(A, B, C, N);
cudaDeviceSynchronize();
}
1.2 1D vecAdd + Float4
启用向量化合并访存。每个thread处理4个元素,因此blockPerGrid变少。
# define BLOCKSIZE 1024
__global__ void vecAddKernel(float *A, float *B, float *C, int N){
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 4;
if (idx + 3 < N){
float4 tmp_A = FLOAT4(A[idx]);
float4 tmp_B = FLOAT4(B[idx]);
float4 tmp_C;
tmp_C.x = tmp_A.x + tmp_B.x;
tmp_C.y = tmp_A.y + tmp_B.y;
tmp_C.z = tmp_A.z + tmp_B.z;
tmp_C.w = tmp_A.w + tmp_B.w;
FLOAT4(C[idx]) = tmp_C;
}
}
void vecAdd(float *A, float *B, float *C, int N){
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(CEIL(N,4), BLOCKSIZE)); // modify
vecAddKernel<<<blockPerGrid, threadPerBlock>>>(A, B, C, N);
cudaDeviceSynchronize();
}
1.3 2D matAdd
逻辑和1D几乎没区别,就是row/col需要熟悉一下计算index
# define BLOCKSIZE 32
__global__ void MatAddKernel(float *A, float *B, float *C, int M, int N){
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < M && col < N){
int idx = row * N + col;
C[idx] = A[idx] + B[idx];
}
}
// A[M*N]
void MatAdd(float *A, float *B, float *C, int M, int N){
dim3 threadPerBlock(BLOCKSIZE, BLOCKSIZE)
dim3 blockPerGrid(CEIL(N, BLOCKSIZE), CEIL(M, BLOCKSIZE));
MatAddKernel<<<blockPerGrid, threadPerBlock>>>(A, B, C, M, N);
cudaDeviceSynchronize();
}
2. matMul 矩阵乘
考察频率:超级高。
经典题嘛,当然有事没事就考它,建议被问直接上tiled版本。
2.1 naive版矩阵乘
# define BLOCKSIZE 32
// A[M*K], B[K*N], C[M*N]
__global__ void matMulKernel(float *A, float *B, float *C, int M, int N, int K){
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
// get C[row][col]
if (row < M && col < N){
float sum = 0;
// sum A[row][i] * B[i][col]
for (int i = 0; i < K; i++){
sum += A[row*K + i] * B[i*N + col];
}
C[row*N + col] = sum;
}
}
void matMul(float *A, float *B, float *C, int M, int N, int K){
dim3 threadPerBlock(BLOCKSIZE, BLOCKSIZE);
dim3 blockPerGrid(CEIL(N, BLOCKSIZE), CEIL(M, BLOCKSIZE));
matMulKernel<<<blockPerGrid, threadPerBlock>>>(A, B, C, M, N, K);
cudaDeviceSynchronize();
}
2.2 Tiled Matmul - tiled矩阵乘
thread_tile 版
考察频率:高。
使用 shared memory 的经典优化版本,没事问一下。基础知识罢了,请熟练背诵。
【思路和原理】
GPU 上各种内存的访问速度为 Global memory << shared memory。其中:
- Global memory - 所有thread可访问
- 对应到硬件上为DRAM
-
它不在芯片上,通过高带宽总线连接(DDR/GDDR)连接 -> 最慢
-
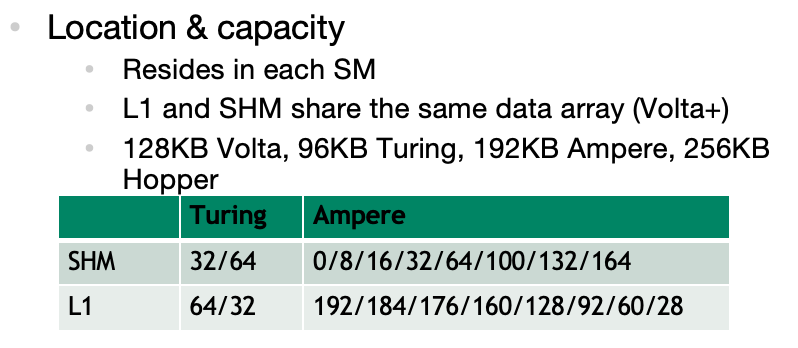
shared memory - per-block
- 同一个block中的所有thread可共享
- ON CHIP!对应到硬件是SM 内部的 SRAM,物理上是和L1 cache share的
Global memory 大而慢, shared memory 小而快,因此减少内存访问延迟的一个常见的策略就是 Tiling —— 将数据分片,然后将每个小分片缓存到 shared memory 中。
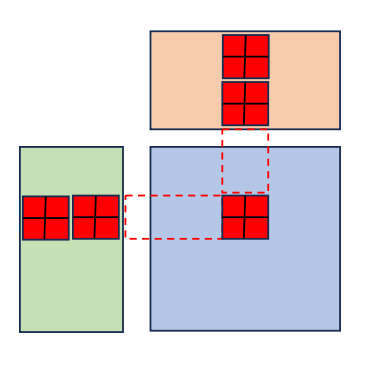
- 为了匹配thread,每个sub matrix形如(BLOCKSIZE, BLOCKSIZE)
- 为了计算C中的sub matrix,多次迭代load A/B 中的sub matrix 进入shared memory,每次计算一个分块矩阵乘,然后叠加得到这部分结果
【复杂度分析】
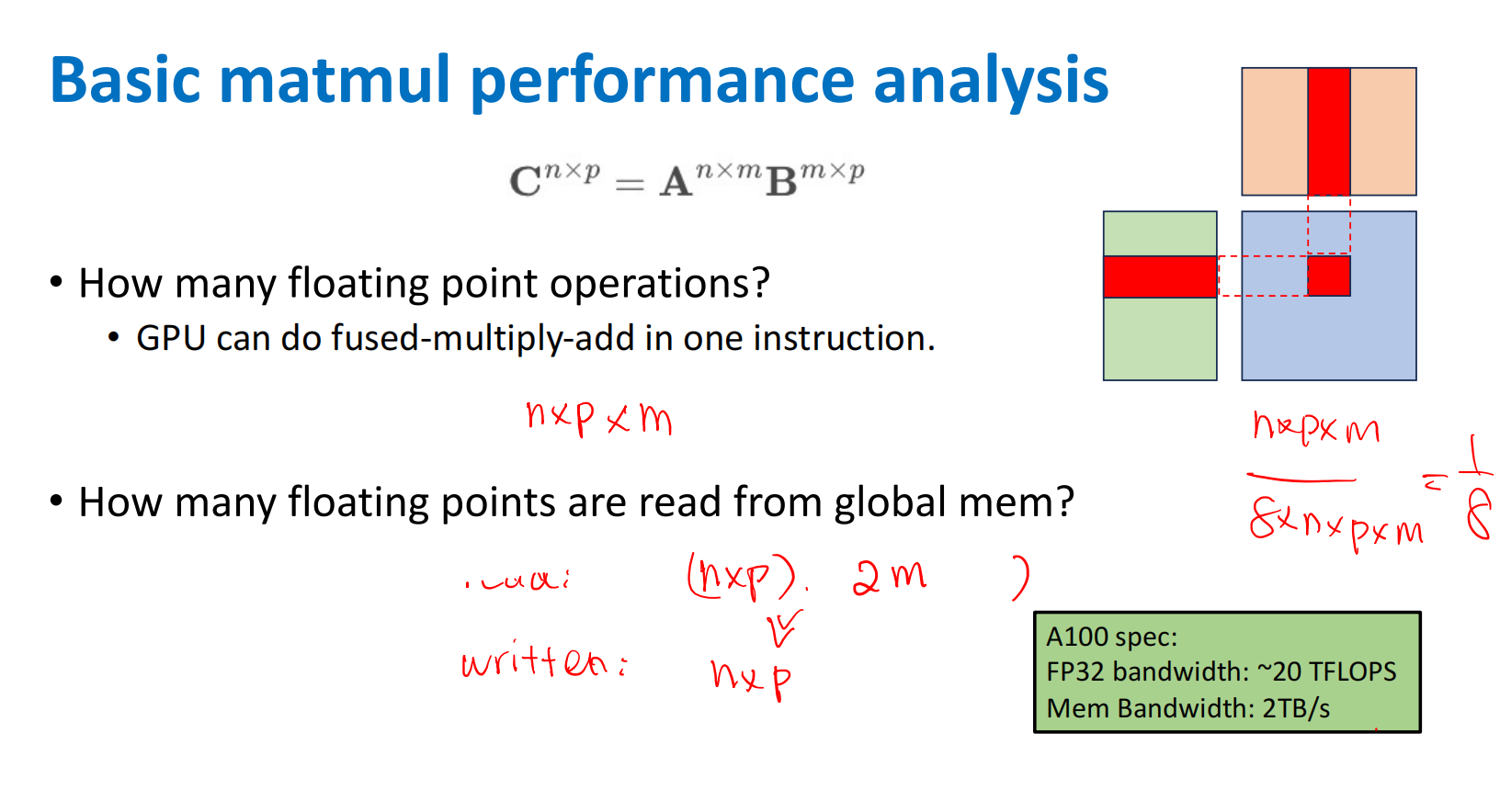
GPU 的计算能力(TFLOPS)通常远大于其内存带宽 bandwidth(TB/s),所以内存带宽往往才是瓶颈。
假设
-
Naive Matmul
-
each C element: \(m\) - load
- Total: \(n*p\) - elements
- Total Load + store: \(2mnp\)
-
Tiled Matmul
-
Tiled Size: \(d*d\)
- each C sub matrix: \(n/d\) - loads of \(d*d\) = \(nd\)
- Total: \(m*p/d^2\) - elements
- Total Load + store: \(2mnp/d\)
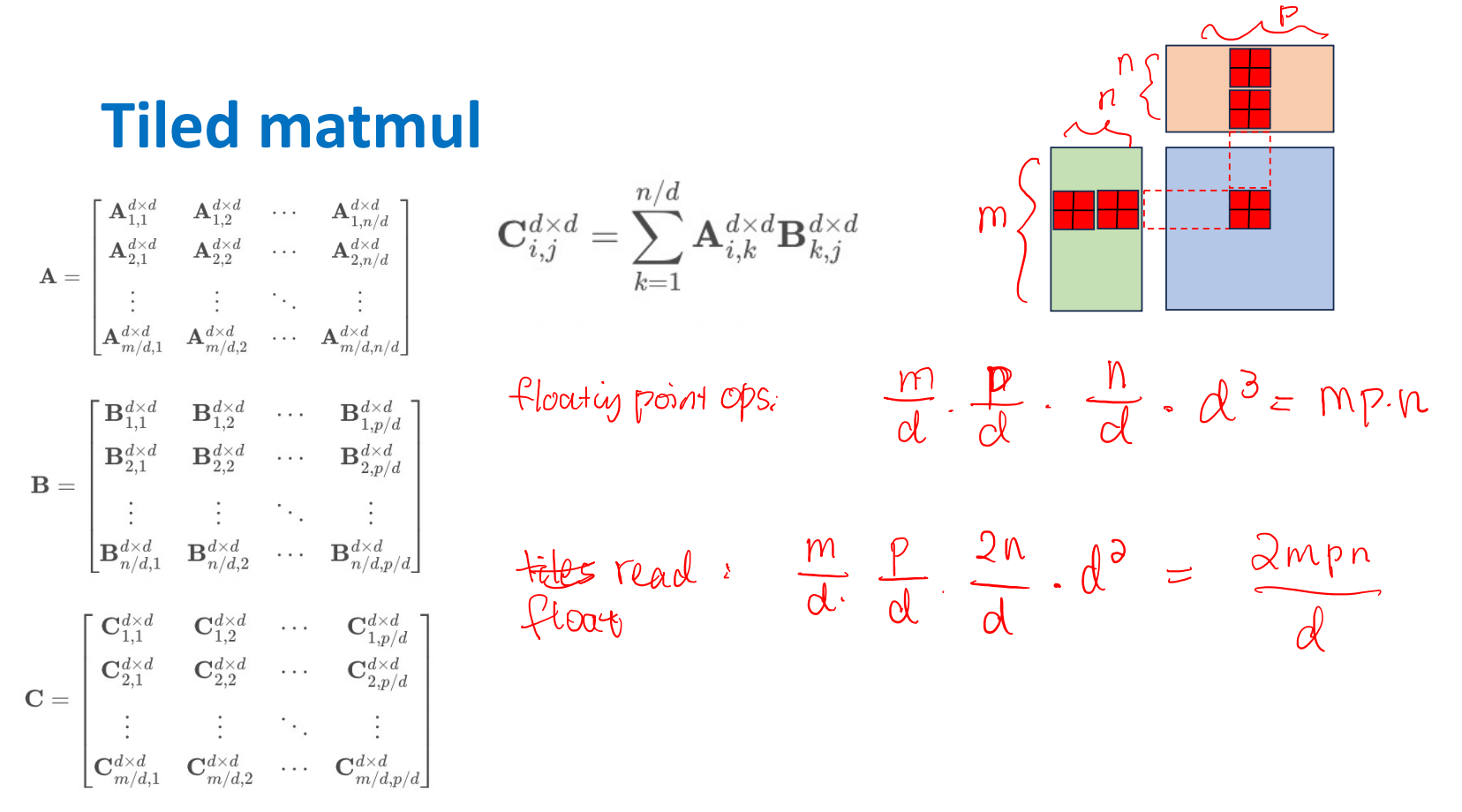
结论:load/store相差了一个d的倍数。
【实现】
# define BLOCKSIZE 32
// A[M*K], B[K*N], C[M*N]
__global__ void matMulTiledKernel(float *A, float *B, float *C, int M, int N, int K){
// assign shared memory
__shared__ float As[BLOCKSIZE][BLOCKSIZE];
__shared__ float Bs[BLOCKSIZE][BLOCKSIZE];
// global pos in C
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
float sum = 0;
int numTiles = CEIL(K, BLOCKSIZE);
for (int t = 0; t < numTiles; t++){
// compute padding
int offset = t * BLOCKSIZE;
// load Tiled A - 😖 each thread help to load one
int loadA_col = offset + threadIdx.x;
if (row < M && loadA_col < K) {
As[threadIdx.y][threadIdx.x] = A[row * K + loadA_col];
} else {
As[threadIdx.y][threadIdx.x] = 0;
}
// load Tiled B
int loadB_row = offset + threadIdx.y;
if (col < N && loadB_row < K) {
Bs[threadIdx.y][threadIdx.x] = B[loadB_row * N + col];
} else {
Bs[threadIdx.y][threadIdx.x] = 0;
}
// wait for all thread done, then compute
__syncthreads();
for (int k = 0; k < BLOCKSIZE; k++){
sum += As[threadIdx.y][k] * Bs[k][threadIdx.x];
}
// wait and sync, ensure SMEM is avaiable next round
__syncthreads();
}
// store C[x][y]
if (row < M && col < N){
C[row * N + col] = sum;
}
}
void matMul(float *A, float *B, float *C, int M, int N, int K){
dim3 threadPerBlock(BLOCKSIZE, BLOCKSIZE);
dim3 blockPerGrid(CEIL(N, BLOCKSIZE), CEIL(M, BLOCKSIZE));
matMulTiledKernel<<<blockPerGrid, threadPerBlock>>>(A, B, C, M, N, K);
cudaDeviceSynchronize();
}
3. Transpose 转置
考察频率:中。
去年被问过一次,总之就是很简单。
# define BLOCKSIZE 32
__global__ void matTransposeKernel(float *A, float *B, int M, int N){
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < M && col < N){
int idx_A = row*N + col;
int idx_B = col*M + row;
B[idx_B] = A[idx_A];
}
}
void matTranspose(float *A, float *B, int M, int N){
dim3 threadPerBlock(BLOCKSIZE, BLOCKSIZE);
dim3 blockPerGrid(CEIL(N,BLOCKSIZE), CEIL(M,BLOCKSIZE));
matTransposeKernel<<<blockPerGrid, threadPerBlock>>>(A, B, M, N)
cudaDeviceSynchronize();
}
4. Reduce 1D规约
考察频率:高。
以sum为代表,被问过sum和avg。建议被问直接上wrap shuffle版本。Reduce系列也适合上float4。
4.1 naive版-atom
原子操作:该操作绝不会在执行完毕前被任何其他任务或事件打断,是最小的执行单位。CUDA的原子操作可以理解为对一个变量进行“读取-修改-写入”这三个操作的一个最小单位的执行过程 ==> 不可并行
相关操作:atomicAdd、atomicSub、atomicExch(交换操作)、atomicMin等。
# define BLOCKSIZE 1024
__global__ reduceKernelV1(float *A, float *output, int N){
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N){
atomicAdd(output, A[idx]);
}
}
void reduce(float *A, float *output, int N){
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(N,BLOCKSIZE));
float h_output = 0;
cudaMemcpy(output, &h_output, sizeof(float), cudaMemcpyHostToDevice);
reduceKernelV1<<<blockPerGrid, threadPerBlock>>>(A, output, N);
cudaDeviceSynchronize();
}
4.2 block内折半归约
block内进行折半归约。需要:BLOCK_SIZE是2的幂。
# define BLOCKSIZE 1024
__global__ void reduceBlockKernel(float *A, float *output, int N){
int idx = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
__shared__ float As[BLOCKSIZE];
// load to SMEM
As[tid] = (idx < N) ? A[idx] : 0;
__syncthreads();
// fold reduce
for (int offset = BLOCKSIZE >> 1; offset > 0; offset >>= 1){
if (tid < offset) As[tid] += As[tid + offset];
__syncthreads();
}
// load back to DRAM
if (tid == 0) atomicAdd(output, As[tid]);
}
void reduce(float *A, float *output, int N){
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(N,BLOCKSIZE));
reduceBlockKernel<<<blockPerGrid, threadPerBlock>>>(A, output, N);
cudaDeviceSynchronize();
}
4.3 warp shuffle 折半归约
在 warp 内进行折半归约。
wrap是调度的最小单元,一个 warp 内的线程是同步的,所以以wrap为单位的折半不用 __syncthreads(),效率相对更高。
同时,一个wrap中的线程交换数据可以通过Register寄存器(快)
lane_id:目标thread在wrap中的Lane ID,范围为 \([0, 31]\)mask:掩码,通常填0xFFFFFFFF表示全 Warp 同步,这是一个16进制表示法,相当于一个 32 位的二进制全1值。
此处相关 warp shuffle操作
__shfl_sync(mask, val, src_lane, width=32):从线程src_lane拷贝val的值__shfl_down_sync(mask, val, delta, width=32):从线程lane_id + delta线程拷贝val的值
一个 warp 内的线程是同步的,相比于以 block 为单位进行折半,以 warp 为单位进行每次折半时不需要 __syncthreads(),所以并行性更高。
-
流程:wrap内reduce -> wrap_sum存入SMEM -> wrap0启用block level reduce。
-
由于我设定的是BLOCKSIZE = WARPSIZE * WARPSIZE,所以第二次SMEM不会超过WARPSIZE
# define BLOCKSIZE 1024
# define WARPSIZE 32
__global__ void reduceWrapKernel(float* A, float* output, int N){
int idx = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
int wrap_id = tid / WARPSIZE;
int lane_id = tid % WARPSIZE;
__shared__ float wrap_sum[BLOCKSIZE/WARPSIZE];
// --- step1: wrap内规约 ---
// get val -> register
float val = (idx < N)? A[idx] : 0;
// in-wrap reduce
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
val += __shfl_down_sync(0xFFFFFFFF, val, offset);
}
// --- step2: wrap间 ---
// gather in-wrap result -> SMEM -> block reduce (done by wrap0)
// gather
if (lane_id == 0) wrap_sum[wrap_id] = val;
__syncthreads();
// block reduce
if (wrap_id == 0){
int num_wrap = BLOCKSIZE/WARPSIZE;
float block_val = (lane_id < num_wrap)? wrap_sum[lane_id] : 0;
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
block_val += __shfl_down_sync(0xFFFFFFFF, block_val, offset);
}
// write result
if (lane_id == 0) atomicAdd(output, block_val);
}
}
void reduce(float *A, float *output, int N){
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(N,BLOCKSIZE));
reduceWrapKernel<<<blockPerGrid, threadPerBlock>>>(A, output, N);
cudaDeviceSynchronize();
}
4.4 warp shuffle + Float4
- 每个线程一次性加载 4 个
float(float4),减少 75% 的全局内存访问次数 BLOCKSIZE从 1024 改为 256(每个线程处理 4 个元素,总计算量不变,还是1024)- 假设总element数是4的倍数(因为懒得处理edge case了)
# define BLOCKSIZE 256
# define WARPSIZE 32
__global__ void reduceWrapTiledV4Kernel(float* A, float* output, int N){
int tid = threadIdx.x;
int wrap_id = tid / WARPSIZE;
int lane_id = tid % WARPSIZE;
int start_idx = (blockIdx.x * blockDim.x + threadIdx.x)*4;
__shared__ float wrap_sum[BLOCKSIZE/WARPSIZE];
// --- step0: 4 element reduce ---
float vec_val = (start_idx + 3 < N)? FLOAT4(A[start_idx]): make_float(0,0,0,0);
float val = vec_val.x + vec_val.y + vec_val.z + vec_val.w;
// --- step1: wrap内规约(后面都一样) ---
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
val += __shfl_down_sync(0xFFFFFFFF, val, offset);
}
// gather in-wrap result -> SMEM -> block reduce (done by wrap0)
// gather
if (lane_id == 0) wrap_sum[wrap_id] = val;
__syncthreads();
// block reduce
if (wrap_id == 0){
int num_wrap = BLOCKSIZE/WARPSIZE;
float block_val = (lane_id < num_wrap)? wrap_sum[lane_id] : 0;
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
block_val += __shfl_down_sync(0xFFFFFFFF, block_val, offset);
}
// write result
if (lane_id == 0) atomicAdd(output, block_val);
}
}
void reduce(float *A, float *output, int N){
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(N, 4*BLOCKSIZE));
reduceWrapTiledV4Kernel<<<blockPerGrid, threadPerBlock>>>(A, output, N);
cudaDeviceSynchronize();
}
5. Reduce 2D行/列规约
考察频率:中。
有时候也会问这个(被问过怎么分配index),根据1D wrap版稍微改改就行,行/列的差别其实不是很大。
这里就可以明显看出,在设计 blockPerGrid和blockPerGrid的时候,需要对index的顺序有一定理解(面试被问过这个dim和index怎么设计)。同时可以发现,row reduce可以用float4访存合并,col reduce不行。
5.1 Column Reduction 列规约
特点:
threadPerBlock的1D设计,不能直接float4合并访存(col数据在物理存储上不连续)
- 基础idea:每个block处理一个列!然后在kernel内部就是对这个element进行一维的reduce啦
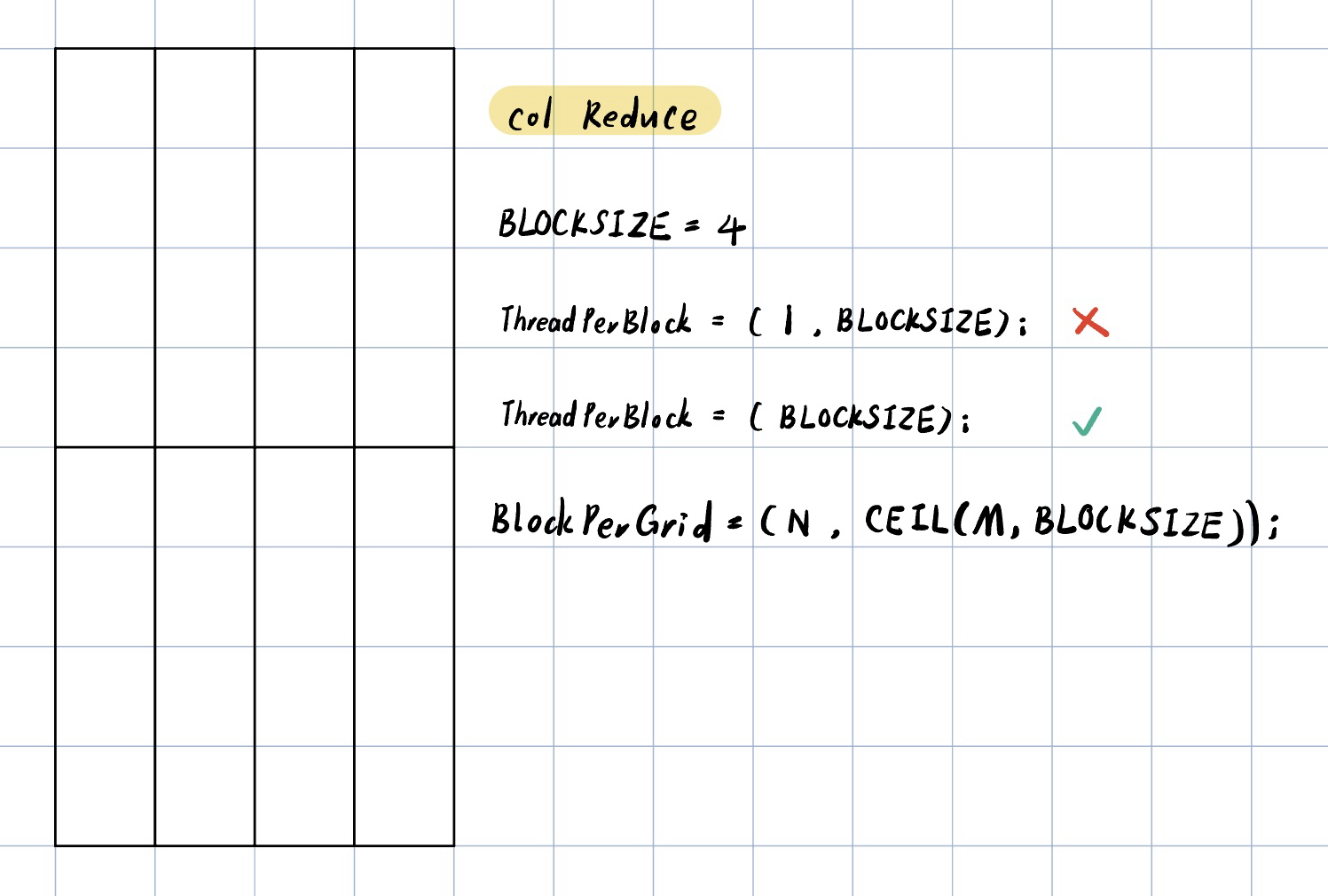
-
Naive的设计(❌):
-
dim3 col_threadPerBlock(1, BLOCKSIZE); dim3 col_blockPerGrid(N, CEIL(M,BLOCKSIZE));- 值得注意的是,分配的row和col相比正常矩阵顺序是反过来的,详见前面的“说明”部分
-
可以吗?不可以!线程束(Warp)效率低下
- CUDA 的线程束由连续的
threadIdx.x组成,(1, )导致每个线程束仅包含 1个有效线程 - 实际31/32是浪费的
- CUDA 的线程束由连续的
-
正确的配置
-
dim3 col_threadPerBlock(BLOCKSIZE); dim3 col_blockPerGrid(N, CEIL(M,BLOCKSIZE));- 需要注意index的计算
int col = blockIdx.xint row = blockIdx.y * blockDim.x + threadIdx.x
# define BLOCKSIZE 1024
# define WARPSIZE 32
// A[M*N], B[1*N]
__global__ void reduceColsKernel(const float* A, float* output, int M, int N){
int col = blockIdx.x;
int global_row = blockIdx.y * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
int wrap_id = tid/WARPSIZE;
int lane_id = tid%WARPSIZE;
__shared__ float wrap_sum[BLOCKSIZE/WARPSIZE];
// in-wrap reduce
float val = (global_row < M)? A[global_row * N + col]:0;
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
val += __shfl_down_sync(0xFFFFFFFF, val, offset);
}
if (lane_id == 0){
wrap_sum[wrap_id] = val;
}
__syncthreads();
// inter-wrap reduce - use wrap0 to do so
if (wrap_id == 0){
float tmp_sum = (lane_id < (BLOCKSIZE/WARPSIZE))? wrap_sum[lane_id]:0;
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
tmp_sum += __shfl_down_sync(0xFFFFFFFF, tmp_sum, offset);
}
// put to final
if (lane_id == 0) atomicAdd(&output[col], tmp_sum);
}
}
void reduce(const float *A, float *B_col, float *B_row, int M, int N){
dim3 col_threadPerBlock(BLOCKSIZE);
dim3 col_blockPerGrid(N, CEIL(M,BLOCKSIZE));
reduceColKernel<<<col_blockPerGrid, col_threadPerBlock>>>(A, B_col, M, N);
cudaDeviceSynchronize();
}
5.2 Row Reduction 行规约
特点:
threadPerBlock的1D/2D都可以,可以float4合并访存(row数据在物理存储上连续)
# define BLOCKSIZE 1024
# define WARPSIZE 32
// A[M*N], B[M*1]
__global__ void reduceRowsKernel(const float* A, float* output, int M, int N){
int row = blockIdx.y;
int global_col = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
// 后面都一样
int wrap_id = tid/WARPSIZE;
int lane_id = tid%WARPSIZE;
__shared__ float wrap_sum[BLOCKSIZE/WARPSIZE];
// in-wrap reduce
float val = (global_col < N)? A[row * N + global_col]:0;
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
val += __shfl_down_sync(0xFFFFFFFF, val, offset);
}
if (lane_id == 0){
wrap_sum[wrap_id] = val;
}
__syncthreads();
// inter-wrap reduce - use wrap0 to do so
if (wrap_id == 0){
float tmp_sum = (lane_id < (BLOCKSIZE/WARPSIZE))? wrap_sum[lane_id]:0;
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
tmp_sum += __shfl_down_sync(0xFFFFFFFF, tmp_sum, offset);
}
// put to final
if (lane_id == 0) atomicAdd(&output[row], tmp_sum);
}
}
void reduce(const float *A, float *B_col, float *B_row, int M, int N){
dim3 row_threadPerBlock(BLOCKSIZE);
dim3 row_blockPerGrid(CEIL(N,BLOCKSIZE), M);
reduceRowsKernel<<<row_blockPerGrid, row_threadPerBlock>>>(A, B_row, M, N);
cudaDeviceSynchronize();
}
6. Softmax
考察频率:低。
是的我还没被面过这个题,但看别人的帖子说挺重要的,或许是intern的要求低一点?总之也需要准备,学习时借鉴了别人的帖子。
学习后的结论:能写出来比较重要,面试时建议直接实现 基于Warp(线程束)的设计,被问及限制性的时候再说:大矩阵时使用两阶段reduce(如前面的wrap shuffle reduce)。
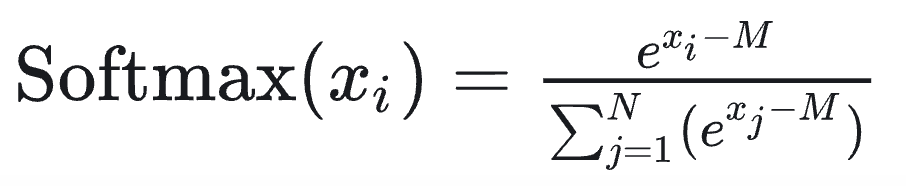
- softmax的公式:
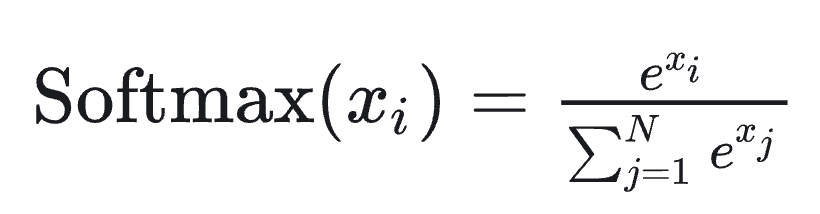
- softmax的计算分为三个步骤:最大值、求指数和、计算指数并归一化(因为避免溢出,要减去最大值):
6.1 2D Softmax Tiled
思路:rolwise reduce,每行分别计算softmax
- 一个行开一个block,计算该行的softmax
- Step1:求行最大值
lane_id循环获得idx%32 == lane_id处的max_val- Wrap内规约得到整行最大值 -> 写入SMEM,sync
- Step2:求该行的exp指数和
lane_id循环叠加idx%32 == lane_id处的exp(A[row][col] - M)- Wrap内规约得到整行
exp_sum-> 写入SMEM,sync - Step3:elementwise 地计算每个output
lane_id循环获得idx%32 == lane_id处,计算最终softmax数值
# define WARPSIZE 32
__global__ void softmax2DKernel(float* A, float* B, int M, int N){
__shared__ float s_max_val;
__shared__ float s_sum_val;
int row = blockIdx.x;
int lane_id = threadIdx.x % WARPSIZE;
int iteration = CEIL(N, WARPSIZE);
// --- stage 1: 求最大值 ---
float max_val = -FLT_MAX;
for (int i = 0; i < iteration; i++){
int col = i * WARPSIZE + lane_id;
if (col < N) max_val = fmaxf(max_val, A[row * N + col]);
}
// wrap内求max
for(int offset = WARPSIZE/2; offset > 0; offset >>= 1) {
max_val = fmaxf(max_val, __shfl_down_sync(0xFFFFFFFF, max_val, offset));
}
// 写入SMEM
if (lane_id == 0) s_max_val = max_val;
__syncthreads();
// --- stage 2: 求exp指数和 ---
float exp_sum = 0;
for (int i = 0; i < iteration; i++){
int col = i * WARPSIZE + lane_id;
if (col < N) exp_sum += expf(A[row * N + col] - s_max_val);
}
// wrap内求指数sum
for(int offset = WARPSIZE/2; offset > 0; offset >>= 1) {
exp_sum += __shfl_down_sync(0xFFFFFFFF, exp_sum, offset);
}
// 写入SMEM
if(lane_id == 0) s_sum_val = exp_sum;
__syncthreads();
// --- stage 3: 计算Softmax ---
for(int i = 0; i < iteration; i++){
int col = i * WARPSIZE + lane_id;
if(col < N) B[row * N + col] = expf(A[row * N + col] - s_max_val) / s_sum_val;
}
}
void softmax2D(float* A, float* B, int M, int N) {
dim3 threadPerBlock(WARPSIZE);
dim3 blockPerGrid(M);
softmax2DKernel<<<blockPerGrid, threadPerBlock>>>(A, B, M, N);
cudaDeviceSynchronize();
}
6.2 2D Softmax Tiled + Float4
- 列数需要是4的倍数,不然写了向量化也不会明显加速
- 每个warp处理 4*32 个元素
- 但是这里2次reduce + 1次elementwise!谁没事写3次vec4啊!建议面试不要写这个
# define WARPSIZE 32
__global__ void softmax2DV4Kernel(float* A, float* B, int M, int N){
__shared__ float s_max_val;
__shared__ float s_sum_val;
int row = blockIdx.x;
int lane_id = threadIdx.x % WARPSIZE;
int iteration = CEIL(N, WARPSIZE*4);
// --- stage 1: 向量化求最大值 ---
float max_val = -FLT_MAX;
for (int i = 0; i < iteration; i++){
int col = (i * WARPSIZE + lane_id)*4;
if (col + 3 < N){
float4 vec = FLOAT4(A[row * N + col]);
max_val = fmaxf(max_val, fmaxf(fmaxf(vec.x, vec.y), fmaxf(vec.z, vec.w)));
}
}
// wrap内求max
for(int offset = WARPSIZE/2; offset > 0; offset >>= 1) {
max_val = fmaxf(max_val, __shfl_down_sync(0xFFFFFFFF, max_val, offset));
}
// 写入SMEM
if (lane_id == 0) s_max_val = max_val;
__syncthreads();
// --- stage 2: 向量化求exp指数和 ---
float exp_sum = 0;
for (int i = 0; i < iteration; i++) {
int col = (i * WARPSIZE + lane_id) * 4;
if (col + 3 < N) {
float4 vec = FLOAT4(A[row * N + col]);
exp_sum += expf(vec.x - s_max_val) + expf(vec.y - s_max_val)
+ expf(vec.z - s_max_val) + expf(vec.w - s_max_val);
}
}
// wrap内求指数sum
for(int offset = WARPSIZE/2; offset > 0; offset >>= 1) {
exp_sum += __shfl_down_sync(0xFFFFFFFF, exp_sum, offset);
}
// 写入SMEM
if(lane_id == 0) s_sum_val = exp_sum;
__syncthreads();
// --- stage 3: 向量化计算Softmax ---
const float sum_inv = 1.0f / s_sum_val;
for (int i = 0; i < iteration; i++) {
int col = (i * WARPSIZE + lane_id) * 4;
if (col + 3 < N) {
float4 vec = FLOAT4(A[row * N + col]);
float4 result;
result.x = expf(vec.x - s_max_val) * sum_inv;
result.y = expf(vec.y - s_max_val) * sum_inv;
result.z = expf(vec.z - s_max_val) * sum_inv;
result.w = expf(vec.w - s_max_val) * sum_inv;
FLOAT4(B[row * N + col]) = result;
}
}
}
void softmax2D(float* A, float* B, int M, int N) {
dim3 threadPerBlock(WARPSIZE);
dim3 blockPerGrid(M);
softmax2DV4Kernel<<<blockPerGrid, threadPerBlock>>>(A, B, M, N);
cudaDeviceSynchronize();
}
6.3 1D Softmax
同上,除了grid(1) 和 A[row * N + col] 直接替换为 A[idx] 以外没有区别。
7. conv
考察频率:低。
搜面经搜到了,我也还没被考过。但是学一下好了?但是其中很多参数设计是按我自己的理解写的(因为网上参考不多)。可以向量化优化但我觉得没必要(写累死了)
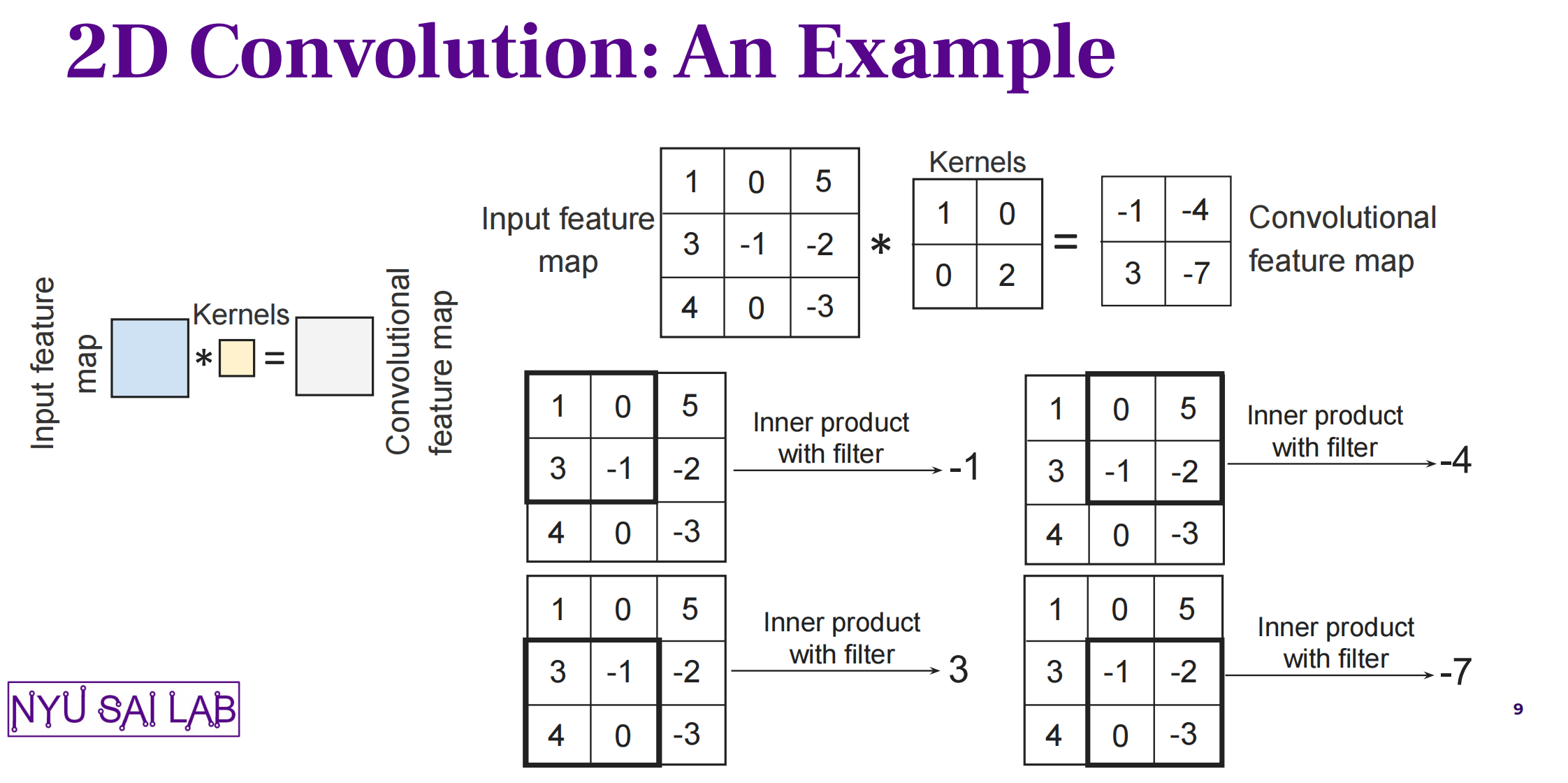
首先来复习一下卷积操作(此处忽视stride):
- Input:matrix (size = N) + kernel (size = K)
- 每个对应位置:elementwise乘法 + 求和 -> output matrix
- Output (size = N - K + 1)
7.1 1D conv - naive
算法设计:
- 让每一个thread处理一个 output 中的位置:读一部分数据 -> 计算卷积 -> 写入output
# define BLOCKSIZE 1024
__global__ void conv1DKernel(const float *input, const float *kernel, float *output, int N, int K){
int tid = blockIdx.x * blockDim.x + threadIdx.x;
if (tid >= N - K + 1) return;
float tmp = 0;
for (int i = 0; i < K; i++){
tmp += input[tid+i] * kernel[i];
}
output[tid] = tmp;
}
void conv1D(const float *input, const float *kernel, float *Kernel output, int N, int K){
int output_size = N - K + 1;
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(output_size, BLOCKSIZE));
conv1DKernel<<<blockPerGrid, threadPerBlock>>>(input, kernel, output, N, K);
cudaDeviceSynchronize();
}
7.2 1D conv - Tiled
算法设计:
- 每个 block 的 thread 数量对应要读的元素数 = BLOCKSIZE
- 但是只有前 (BLOCKSIZE + 1 - K) 个thread负责写入output
- 动态共享内存的定义方式
extern __shared__ float s_input[];
# define BLOCKSIZE 1024
__global__ void conv1DKernalTiled(const float *input, const float *kernel, float *output, int N, int K){
int O_Total = BLOCKSIZE - K + 1;
extern __shared__ float s_input[];
int tid = threadIdx.x;
int block_start = blockIdx.x * O_Total;
// --- Step1: load into SMEM ---
s_input[tid] = (block_start + tid < N)? input[block_start + tid]:0;
__syncthreads();
// --- Step2: compute ---
int o_idx = block_start + tid;
if (tid < O_Total){
float sum = 0;
#pragma unroll
for (int i = 0; i < K; i++){
sum += s_input[tid+i]*kernel[i];
}
if(o_idx < N-K+1) output[o_idx] = sum;
}
}
void conv1D(const float *input, const float *kernel, float *Kernel output, int N, int K){
int output_size = N - K + 1;
dim3 threadPerBlock(BLOCKSIZE);
dim3 blockPerGrid(CEIL(output_size, BLOCKSIZE - K + 1));
size_t shared_mem_size = BLOCKSIZE * sizeof(float);
conv1DKernalTiled<<<blockPerGrid, threadPerBlock>>>(input, kernel, output, N, K);
cudaDeviceSynchronize();
}
7.3 2D conv - naive
算法设计:
- 让每一个thread处理一个 output 中的位置
# define BLOCKSIZE 32
// input[M * N]
__global__ void conv2DKernel(const float *input, const float *kernel, float *output, int M, int N, int K){
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row >= M - K + 1 || col >= N - K + 1) return;
float tmp = 0;
for (int i = 0; i < K; i++){
for (int j = 0; j < K; j++){
tmp += input[(row+i)*N + (col+j)] * kernel[i*K + j];
}
}
output[row * (N - K + 1) + col] = tmp;
}
void conv2D(const float *input, const float *kernel, float *output, int M, int N, int K){
int output_M = M - K + 1;
int output_N = N - K + 1;
dim3 threadPerBlock(BLOCKSIZE, BLOCKSIZE);
dim3 blockPerGrid(CEIL(output_N, BLOCKSIZE), CEIL(output_M, BLOCKSIZE));
conv2DKernel<<<blockPerGrid, threadPerBlock>>>(input, kernel, output, M, N, K);
cudaDeviceSynchronize();
}
7.4 2D conv - Tiled
算法设计(K < 32才行):
- 每个 block 的 thread 数量对应要读的元素数 = BLOCKSIZE
- 但是只有左上角 (BLOCKSIZE + 1 - K, BLOCKSIZE + 1 - K) 个thread负责写入output
# define BLOCKSIZE 32
// input[M * N]
__global__ void conv2DKernelTiled(const float *input, const float *kernel, float *output, int M, int N, int K){
int O_Total = BLOCKSIZE - K + 1;
extern __shared__ float s_input[];
int x_start = blockIdx.y * O_Total;
int y_start = blockIdx.x * O_Total;
int x_tid = threadIdx.y;
int y_tid = threadIdx.x;
// --- Step1: load into SMEM ---
if (x_start + x_tid < M && y_start + y_tid < N) s_input[x_tid][y_tid] = input[(x_start + x_tid)*N + y_start + y_tid];
else s_input[x_tid][y_tid] = 0;
__syncthreads();
// --- Step2: compute ---
int o_x = x_start + x_tid;
int o_y = y_start + y_tid;
if (x_tid < O_Total && y_tid < O_Total){
float sum = 0;
for (int i = 0; i < K; i++){
for (int j = 0; j < K; j++){
sum += s_input[x_tid + i][y_tid + j] * kernel[i*K+j];
}
}
if (o_x < M-K+1 && o_y < N-K+1) output[o_x*(N-K+1)+o_y] = sum;
}
}
void conv2D(const float *input, const float *kernel, float *output, int M, int N, int K){
if (M < K || N < K) return;
int output_M = M - K + 1;
int output_N = N - K + 1;
const int O_Total = BLOCKSIZE - K + 1;
dim3 threadPerBlock(BLOCKSIZE, BLOCKSIZE);
dim3 blockPerGrid(CEIL(output_N, O_Total), CEIL(output_M, O_Total));
size_t shared_size = BLOCKSIZE * BLOCKSIZE * sizeof(float);
conv2DKernelTiled<<<blockPerGrid, threadPerBlock>>>(input, kernel, output, M, N, K, shared_size);
cudaDeviceSynchronize();
}
8. Layer Norm
考察频率:低
面经里好像没怎么见过问这个的,但听说我NV之前的组,面试考过别人这个(?)
虽然不知道是校招还是社招总之准备一下好了。本质是个行规约,故此处是用和softmax一样的wrap reduce处理。
向量化的添加,和softmax一样诚恳地建议3次vec4还是算了吧。
8.1 Layer Norm - Tiled
和假设 input[NxK](大不了用pytorch reshape一下),然后以第一个维度为pivot做norm。步骤:
-
Step1:计算sum -> 得到 \(\mu\)
-
Step2:计算 \(\sigma^2 = \frac{1}{K} \sum_{k=1}^{K} (x_k - \mu)^2 + \epsilon\)
-
Step3:elementwise process -> Norm (aX + b, epsilon)
# define WARPSIZE 32
__global__ void layerNormKernel(const float *A, float *B, int N, int K, float epsilon, float a, float b){
int row = blockIdx.x;
int lane_id = threadIdx.x % WARPSIZE;
int iteration = CEIL(K, WARPSIZE);
__shared__ float s_mean;
__shared__ float s_variance;
// --- stage 1: 求 mean ---
float sum_val = 0;
for (int i = 0; i < iteration; i++){
int col = i * WARPSIZE + lane_id;
if (col < K) sum_val += A[row * K + col];
}
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
sum_val += __shfl_down_sync(0xFFFFFFFF, sum_val, offset);
}
if (lane_id == 0) s_mean = sum_val / K;
__syncthreads();
// --- stage 2: 求 variance ---
float var_sum = 0;
for (int i = 0; i < iteration; i++) {
int col = i * WARPSIZE + lane_id;
if (col < K){
float val = A[row * K + col];
var_sum += (val - s_mean) * (val - s_mean);
}
}
for (int offset = WARPSIZE >> 1; offset > 0; offset >>= 1){
var_sum += __shfl_down_sync(0xFFFFFFFF, var_sum, offset);
}
if (lane_id == 0) s_variance = rsqrtf(var_sum / K + epsilon);
__syncthreads();
// --- stage 3: 处理每个元素的norm ---
for (int i = 0; i < iteration; i++){
int col = i * WARPSIZE + lane_id;
if (col < K){
float val = A[row * K + col];
float tmp = (val - s_mean)*s_variance;
B[row * K + col] = a*tmp + b;
}
}
}